- #include "ht32.h"
- #include "usart.h"
- #include "Delay.h"
- #include "led.h"
- #include "key.h"
- #include "stdio.h"
- #include "lcd.h"
- #include "gui.h"
- #include "test.h"
- #include "Initerface.h"
- #include "rtc.h"
- #include "time.h"
- #include "ht32_board_config.h"
-
- #define BreatheMax 600 //定时器呼吸灯
-
- uint8_t data[7] = {0};
-
- uint16_t count = 0; //计时
-
- uint8_t puff[4] = {0};
-
- u8 sum = 0;
- u32 succeed = 0;
- u32 fail = 0;
- u32 key_sum = 0;
- u32 rx_data = 0;
- typedef struct
- {
- u32 OverflowCounter;
- u32 StartValue;
- u32 CapturePulse;
- TM_CHP_Enum ChannelPolarity;
- bool DataValid;
- bool DataOverwrite;
- } sPulseCaptureStructure;
-
- void Capture_Configuration(void);
- void Capture_MainRoutine(void);
- void Capture_IRQHandler(void);
- void Capture_Process(sPulseCaptureStructure* cap, u16 capture_value, bool isCapBeforeUpdate);
-
- void PWM_OUT_Configuration(void);
-
-
- sPulseCaptureStructure CaptureCHx;
-
- void Timer_Init(void)
- {
- CKCU_PeripClockConfig_TypeDef CKCUClock= {{0}};
- CKCUClock.Bit.BFTM0 = 1; //开启中断时钟
- CKCU_PeripClockConfig(CKCUClock, ENABLE);
-
- NVIC_EnableIRQ(BFTM0_IRQn);
-
- BFTM_SetCounter(HT_BFTM0, 0);
- //BFTM_SetCompare(HT_BFTM1, SystemCoreClock);//定时1s产生中断
- BFTM_SetCompare(HT_BFTM0, SystemCoreClock/1000);//定时1ms产生中断 呼吸灯1us中断1000000
- BFTM_IntConfig(HT_BFTM0, ENABLE);//使能中断
- BFTM_EnaCmd(HT_BFTM0, ENABLE);//使能BFTM
- }
-
-
- void BFTM0_IRQHandler(void)
- {
- if(BFTM_GetFlagStatus(HT_BFTM0) != RESET )
- {
-
- count++;
- if(count == 500) //
- {
-
- count = 0;
- }
-
- //Capture_MainRoutine();
- BFTM_ClearFlag(HT_BFTM0);//清除中断标志
- }
- }
-
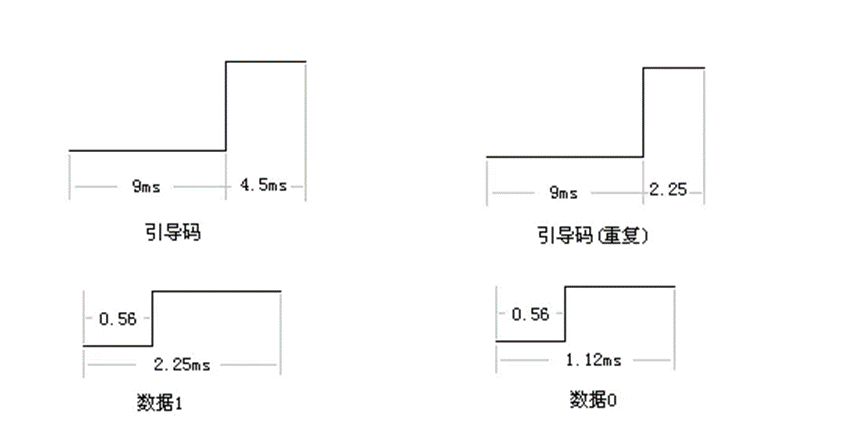
- void Capture_MainRoutine(void)
- {
- u32 Dval = 0;
- u32 data = 9;
-
-
- if (CaptureCHx.DataValid)
- {
- Dval = CaptureCHx.CapturePulse / (SystemCoreClock / 1000000ul);
- //printf("Capture: %d %8.2f uS\r\n", CaptureCHx.CapturePulse, ((float)CaptureCHx.CapturePulse / (SystemCoreClock / 1000000ul)));
-
- if(Dval>4200 && Dval<4700)
- {
- data = 3;
- }
-
- if(Dval>300 && Dval<800)
- {
- data = 0;
- rx_data <<= 1;
- rx_data |= 0;
- sum++;
- }
-
- if(Dval>1400 && Dval<1800)
- {
- data = 1;
- rx_data <<= 1;
- rx_data |= 1;
- sum++;
- }
-
- if(sum >= 32)
- {
- rx_data >>= 8;
- rx_data &= 0x00FF;
- key_sum++;
- switch (rx_data)
- {
- case 0xA2:succeed++;printf("%d:%d + %d = %d%% RX:CH-\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x62:succeed++;printf("%d:%d + %d = %d%% RX:CH\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0xE2:succeed++;printf("%d:%d + %d = %d%% RX:CH+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x22:succeed++;printf("%d:%d + %d = %d%% RX:|<<\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x02:succeed++;printf("%d:%d + %d = %d%% RX:>>|\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0xC2:succeed++;printf("%d:%d + %d = %d%% RX:>||\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0xE0:succeed++;printf("%d:%d + %d = %d%% RX:-\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0xA8:succeed++;printf("%d:%d + %d = %d%% RX:+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x90:succeed++;printf("%d:%d + %d = %d%% RX:EQ\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x68:succeed++;printf("%d:%d + %d = %d%% RX:0\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x98:succeed++;printf("%d:%d + %d = %d%% RX:100+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0xB0:succeed++;printf("%d:%d + %d = %d%% RX:200+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x30:succeed++;printf("%d:%d + %d = %d%% RX:1\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x18:succeed++;printf("%d:%d + %d = %d%% RX:2\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x7A:succeed++;printf("%d:%d + %d = %d%% RX:3\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x10:succeed++;printf("%d:%d + %d = %d%% RX:4\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x38:succeed++;printf("%d:%d + %d = %d%% RX:5\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x5A:succeed++;printf("%d:%d + %d = %d%% RX:6\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x42:succeed++;printf("%d:%d + %d = %d%% RX:7\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x4A:succeed++;printf("%d:%d + %d = %d%% RX:8\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- case 0x52:succeed++;printf("%d:%d + %d = %d%% RX:9\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
- default:fail++;printf("%d:%d + %d = %d%% RX:%X Error! Please reset the reboot!\r\n",key_sum,succeed,fail,(succeed*100)/key_sum,rx_data);break;
- }
- rx_data = 0;
- sum = 0;
- }
-
- CaptureCHx.DataValid = FALSE;
- }
- }
-
- /*********************************************************************************************************//**
- * [url=home.php?mod=space&uid=247401]@brief[/url] Configures TM to capture waveform.
- * @retval None
- ***********************************************************************************************************/
- void Capture_Configuration(void)
- {
- { /* Enable peripheral clock */
- CKCU_PeripClockConfig_TypeDef CKCUClock = {{ 0 }};
- CKCUClock.Bit.AFIO = 1;
- CKCUClock.Bit.HTCFG_CAP_IPN = 1;
- CKCU_PeripClockConfig(CKCUClock, ENABLE);
- }
-
- /* Configure AFIO mode as TM function */
- AFIO_GPxConfig(HTCFG_CAP_GPIO_ID, HTCFG_CAP_AFIO_PIN, AFIO_FUN_MCTM_GPTM);
-
- { /* Time base configuration */
-
- /* !!! NOTICE !!!
- Notice that the local variable (structure) did not have an initial value.
- Please confirm that there are no missing members in the parameter settings below in this function.
- */
- TM_TimeBaseInitTypeDef TimeBaseInit;
-
- TimeBaseInit.Prescaler = 1 - 1; // Timer clock = CK_AHB / 1
- TimeBaseInit.CounterReload = 0xFFFF;
- TimeBaseInit.RepetitionCounter = 0;
- TimeBaseInit.CounterMode = TM_CNT_MODE_UP;
- TimeBaseInit.PSCReloadTime = TM_PSC_RLD_IMMEDIATE;
- TM_TimeBaseInit(HTCFG_CAP_PORT, &TimeBaseInit);
-
- /* Clear Update Event Interrupt flag since the "TM_TimeBaseInit()" writes the UEV1G bit */
- TM_ClearFlag(HTCFG_CAP_PORT, TM_FLAG_UEV);
- }
-
- { /* Channel n capture configuration */
-
- /* !!! NOTICE !!!
- Notice that the local variable (structure) did not have an initial value.
- Please confirm that there are no missing members in the parameter settings below in this function.
- */
- TM_CaptureInitTypeDef CapInit;
-
- TM_CaptureStructInit(&CapInit);
- CapInit.Channel = HTCFG_CAP_CH;
- CapInit.Polarity = TM_CHP_NONINVERTED;
- CapInit.Selection = TM_CHCCS_DIRECT;
- CapInit.Prescaler = TM_CHPSC_OFF;
- #if (LIBCFG_TM_652XX_V1)
- CapInit.Fsampling = TM_CHFDIV_1;
- CapInit.Event = TM_CHFEV_OFF;
- #else
- CapInit.Filter = 0x0;
- #endif
- TM_CaptureInit(HTCFG_CAP_PORT, &CapInit);
- }
-
- /* Enable TM Channel Capture and Update Event interrupts */
- TM_IntConfig(HTCFG_CAP_PORT, HTCFG_CAP_CCR | TM_INT_UEV, ENABLE);
- NVIC_EnableIRQ(HTCFG_CAP_IRQn);
-
- TM_Cmd(HTCFG_CAP_PORT, ENABLE);
- }
-
- /*********************************************************************************************************//**
- * @brief This function handles GPTM interrupt.
- * @retval None
- ***********************************************************************************************************/
- void HTCFG_CAP_IRQHandler(void)
- {
- bool update_flag = FALSE;
-
- /* store and clear all interrupt flags */
- u32 status = HTCFG_CAP_PORT->INTSR;
- u32 cnt = HTCFG_CAP_PORT->CNTR;
- #if 0
- if ((status & TM_INT_UEV) != (HTCFG_CAP_PORT->INTSR & TM_INT_UEV))
- {
- status = HTCFG_CAP_PORT->INTSR;
- cnt = HTCFG_CAP_PORT->CNTR;
- }
- #endif
- HTCFG_CAP_PORT->INTSR = ~status;
-
- if (status & TM_INT_UEV)
- {
- update_flag = TRUE;
- /* The OverflowCounter will stop at max value 0xFFFF */
- if (CaptureCHx.OverflowCounter != 0xFFFF)
- CaptureCHx.OverflowCounter++;
- }
-
- if (status & HTCFG_CAP_CCR)
- {
- u32 cap_value = TM_GetCaptureCompare(HTCFG_CAP_PORT, HTCFG_CAP_CH);
- bool isCapBeforeUpdate = (update_flag && (cap_value > cnt))? TRUE : FALSE;
- Capture_Process(&CaptureCHx, cap_value, isCapBeforeUpdate);
- TM_ChPolarityConfig(HTCFG_CAP_PORT, HTCFG_CAP_CH, CaptureCHx.ChannelPolarity);
- }
- }
-
- /*********************************************************************************************************//**
- * @brief Capture Process function.
- * @retval None
- ************************************************************************************************************/
- void Capture_Process(sPulseCaptureStructure* cap, u16 capture_value, bool isCapBeforeUpdate)
- {
- if (cap->ChannelPolarity == TM_CHP_NONINVERTED)
- {
- /* Reset OverflowCounter and store capture value when rising edge occurred */
- if (isCapBeforeUpdate)
- {
- cap->OverflowCounter = 1;
- }
- else
- {
- cap->OverflowCounter = 0;
- }
-
- cap->StartValue = capture_value;
-
- /* Change channel polarity to capture when falling edge occur */
- cap->ChannelPolarity = TM_CHP_INVERTED;
- }
- else
- {
- /* Compute pulse width in PCLK unit when falling edge occurred */
- if (isCapBeforeUpdate)
- cap->OverflowCounter--;
-
- cap->CapturePulse = (cap->OverflowCounter << 16) - cap->StartValue + capture_value + 1;
-
- if (cap->DataValid)
- cap->DataOverwrite = TRUE;
- else
- cap->DataValid = TRUE;
-
- /* Change channel polarity to capture when rising edge occur */
- cap->ChannelPolarity = TM_CHP_NONINVERTED;
- }
- }
-
- /*********************************************************************************************************//**
- * @brief Configures TM to output PWM waveform.
- * @retval None
- * [url=home.php?mod=space&uid=1543424]@Details[/url] Configuration as frequency 1 Hz and duty 2500 uS (10/4000).
- ***********************************************************************************************************/
- void PWM_OUT_Configuration(void)
- {
- { /* Enable peripheral clock */
- CKCU_PeripClockConfig_TypeDef CKCUClock = {{ 0 }};
- CKCUClock.Bit.AFIO = 1;
- CKCUClock.Bit.HTCFG_PWM_IPN = 1;
- CKCU_PeripClockConfig(CKCUClock, ENABLE);
- }
-
- /* Configure AFIO mode as TM function */
- AFIO_GPxConfig(HTCFG_PWM_GPIO_ID, HTCFG_PWM_AFIO_PIN, HTCFG_PWM_AFIO_FUN);
-
- { /* Time base configuration */
-
- /* !!! NOTICE !!!
- Notice that the local variable (structure) did not have an initial value.
- Please confirm that there are no missing members in the parameter settings below in this function.
- */
- TM_TimeBaseInitTypeDef TimeBaseInit;
-
- TimeBaseInit.Prescaler = (SystemCoreClock / 4000) - 1; // Timer clock = 4 kHz
- TimeBaseInit.CounterReload = 4000 - 1; // PWM frequency = 1 Hz
- TimeBaseInit.RepetitionCounter = 0;
- TimeBaseInit.CounterMode = TM_CNT_MODE_UP;
- TimeBaseInit.PSCReloadTime = TM_PSC_RLD_IMMEDIATE;
- TM_TimeBaseInit(HTCFG_PWM_PORT, &TimeBaseInit);
-
- /* Clear Update Event Interrupt flag since the "TM_TimeBaseInit()" writes the UEV1G bit */
- #if 0
- TM_ClearFlag(HTCFG_PWM_PORT, TM_FLAG_UEV);
- #endif
- }
-
- { /* Channel n output configuration */
-
- /* !!! NOTICE !!!
- Notice that the local variable (structure) did not have an initial value.
- Please confirm that there are no missing members in the parameter settings below in this function.
- */
- TM_OutputInitTypeDef OutInit;
-
- OutInit.Channel = HTCFG_PWM_CH;
- OutInit.OutputMode = TM_OM_PWM2;
- OutInit.Control = TM_CHCTL_ENABLE;
- OutInit.ControlN = TM_CHCTL_DISABLE;
- OutInit.Polarity = TM_CHP_NONINVERTED;
- OutInit.PolarityN = TM_CHP_NONINVERTED;
- OutInit.IdleState = MCTM_OIS_LOW;
- OutInit.IdleStateN = MCTM_OIS_HIGH;
- OutInit.Compare = 4000 - 10; // PWM duty = 10/4000 = 2500 us
- OutInit.AsymmetricCompare = 0;
- TM_OutputInit(HTCFG_PWM_PORT, &OutInit);
- }
-
- TM_Cmd(HTCFG_PWM_PORT, ENABLE);
- }









 楼主
楼主