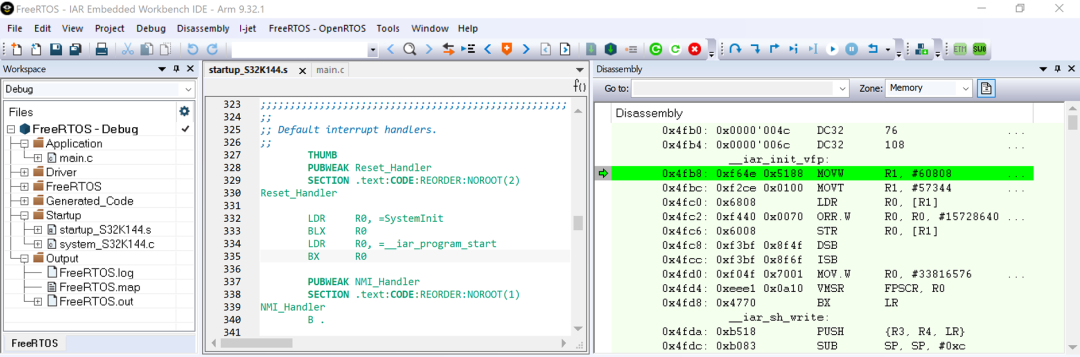
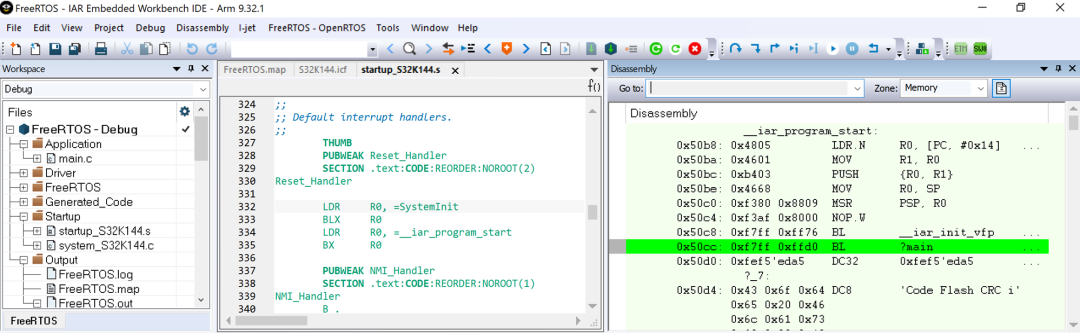
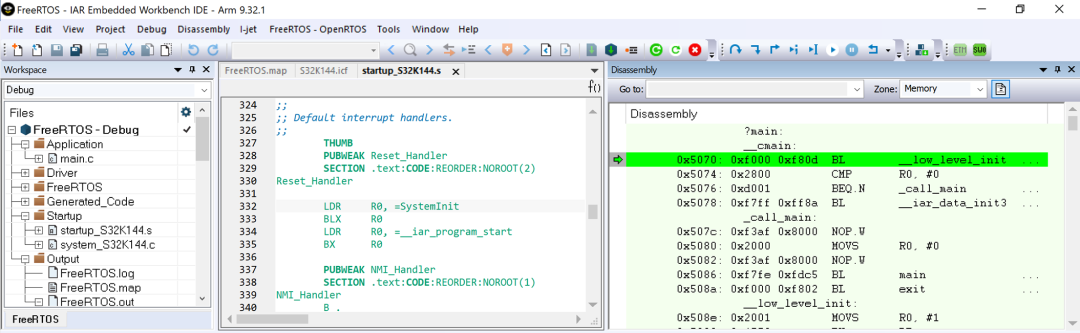
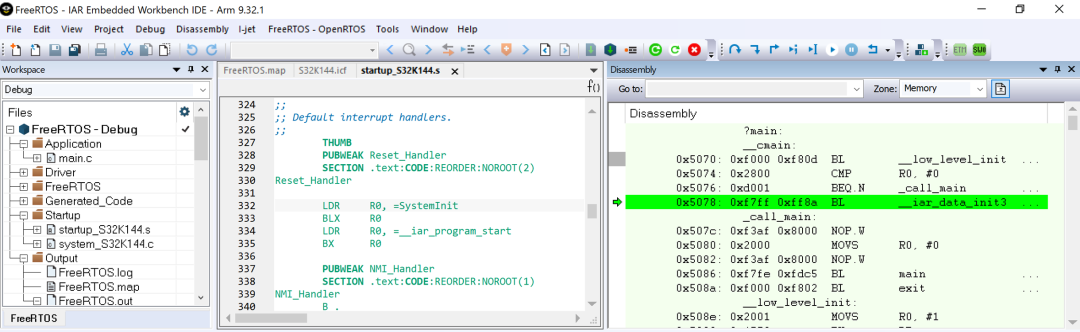
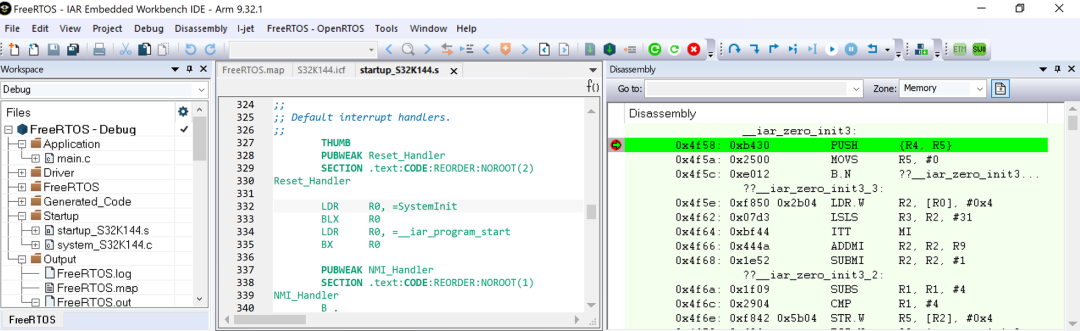
本文以Arm Cortex-M为例,介绍了在IAR Embedded Workbench中微控制器(MCU)的启动过程。在MCU复位后,程序计数器(PC)会指向相应的复位向量,并开始执行启动代码(startup code)。如果MCU支持浮点单元(FPU),则在启动过程中,首先会调用__iar_init_vfp来初始化FPU,然后继续执行__iar_program_start。接着,__iar_program_start会调用__cmain函数。在__cmain中,会先调用__low_level_init函数,然后调用__iar_data_init3来进行全局和静态变量的初始化。在__iar_data_init3中,首先会调用__iar_zero_init3来初始化初始值为0的全局和静态变量,随后会调用__iar_copy_init3来初始化初始值为非0的全局和静态变量。最终,在启动过程的最后阶段,会通过调用__call_main来跳转到main函数,从而开始执行主程序。
MCU启动过程
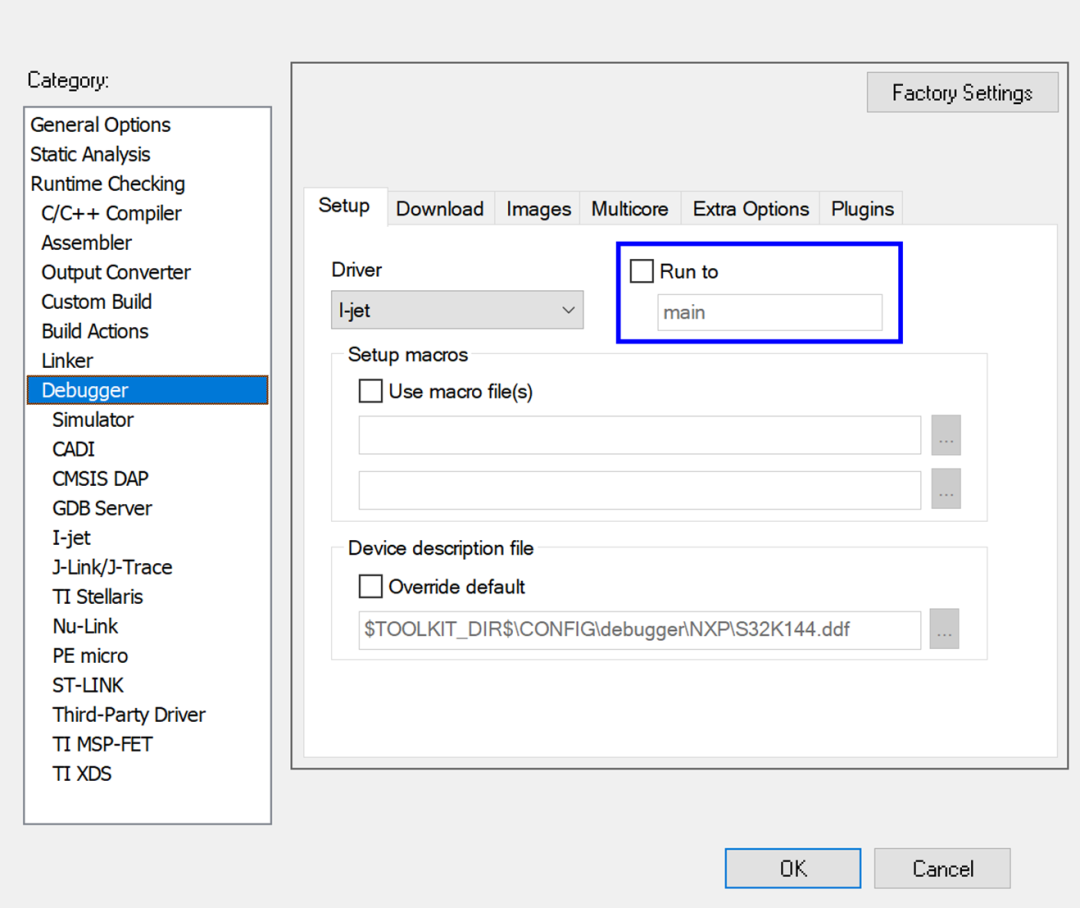
MCU启动过程指的是从MCU复位到main函数之前的过程。
当MCU复位之后,MCU会从对应的复位向量开始运行,初始化Stack pointer指向指定Stack区域的末尾,然后调用__low_level_init函数进行相关的初始化。
(在微控制器(Microcontroller,缩写为MCU)中,复位向量(Reset Vector)是一个特殊的内存地址,用于指示MCU在复位或启动时应该开始执行的第一条指令。当MCU发生复位事件(如上电复位、外部复位、看门狗定时器复位等)时,它会将程序计数器(PC)设置为复位向量的地址,从而开始执行存储在这个地址上的指令。
复位向量通常位于MCU的存储器中的固定位置,通常是在芯片的起始位置。这确保了在复位时能够始终从相同的地址开始执行,从而确保可靠的系统启动。
复位向量的内容可以是任何有效的机器指令,通常是一条跳转指令(比如跳转到主程序的入口点),以便MCU能够开始执行实际的应用程序代码。
总之,复位向量是一个重要的概念,它确保了在MCU复位时,程序能够从可控的、确定的位置开始执行,从而使系统能够正常启动并运行。)
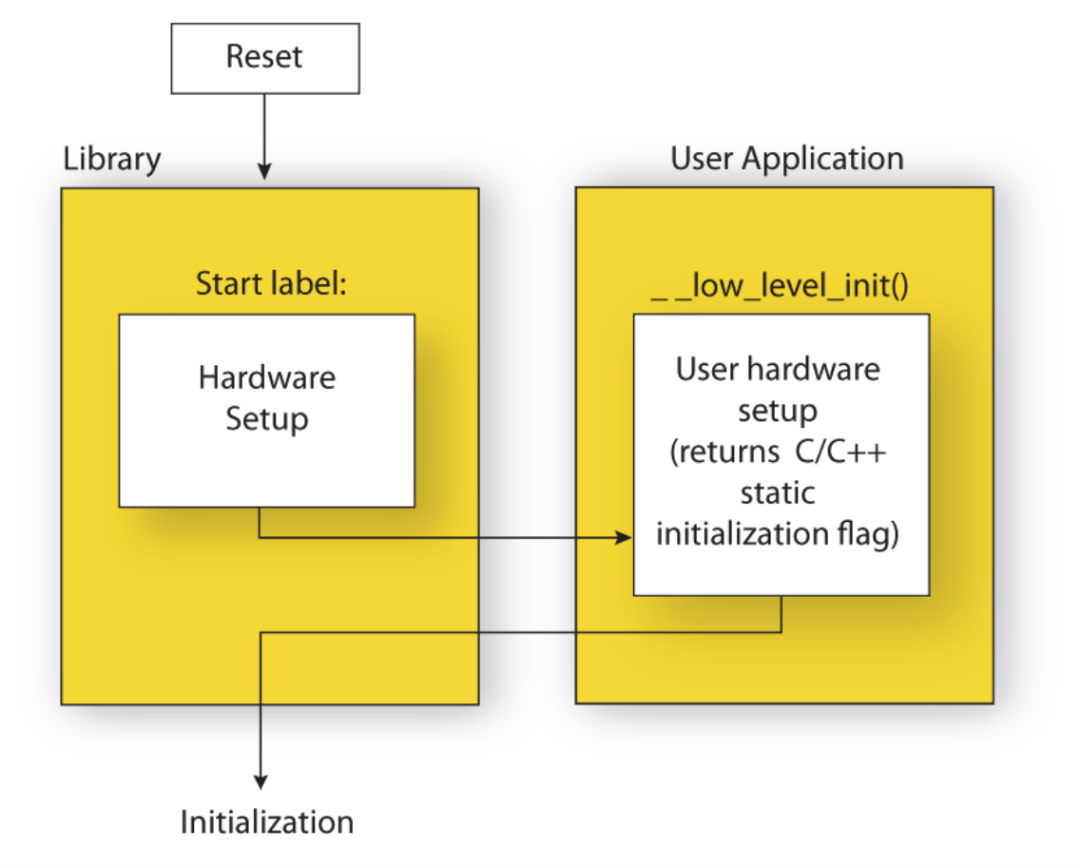
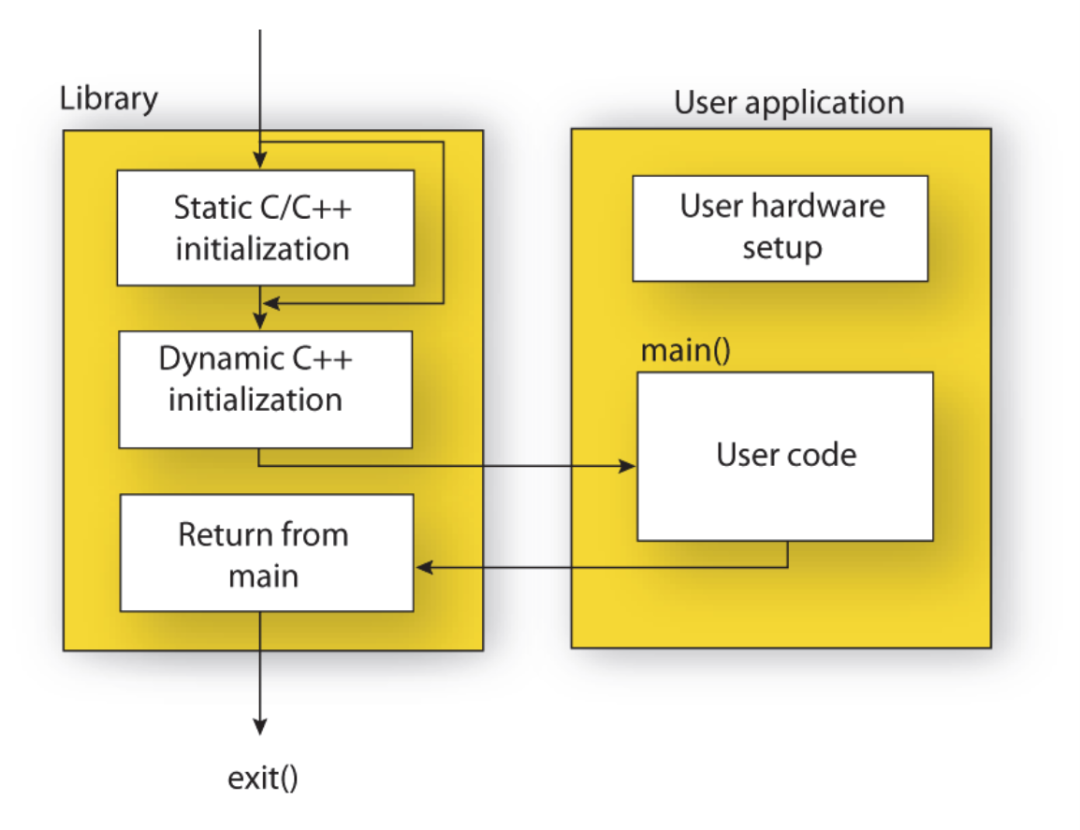
接下来是全局和静态变量的初始化:初始值为0的变量对应的RAM区域会清零,初始值为非0的变量,会从ROM拷贝到RAM(注意:如果__low_level_init函数返回0,这一步将会跳过)。
然后是C++动态初始化:构造静态 C++ 对象,最后会调用main函数。
更具体一点:
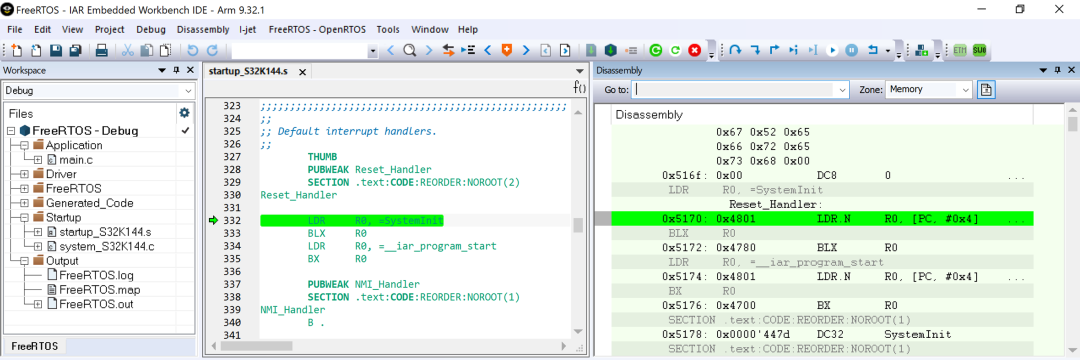
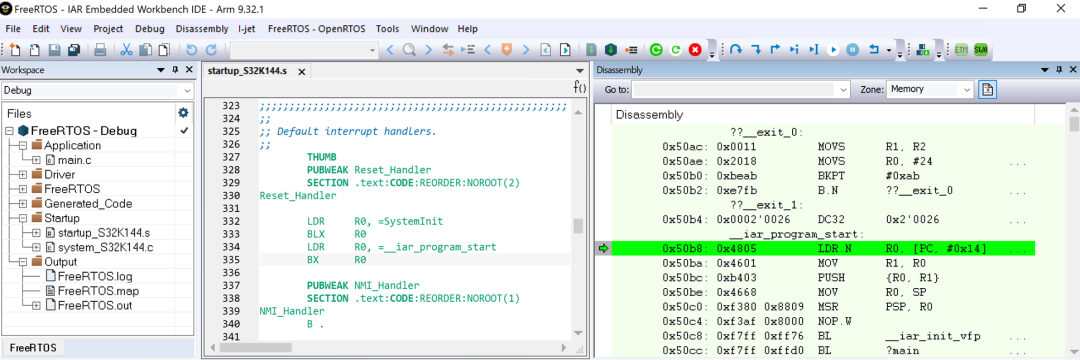
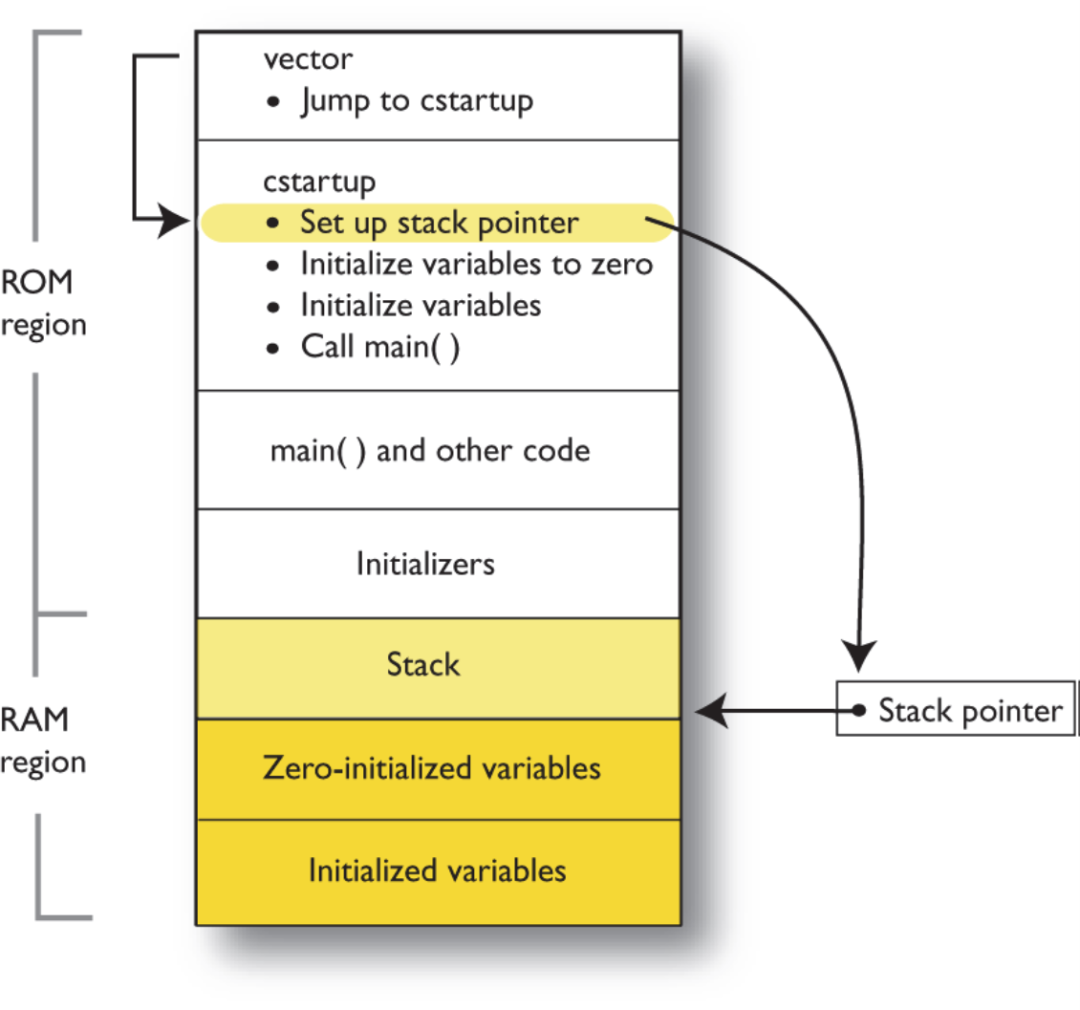
当MCU复位之后,PC指针会指向对应的复位向量,然后运行对应的启动代码(startup code),启动代码首先会初始化Stack pointer指向指定Stack区域的末尾。
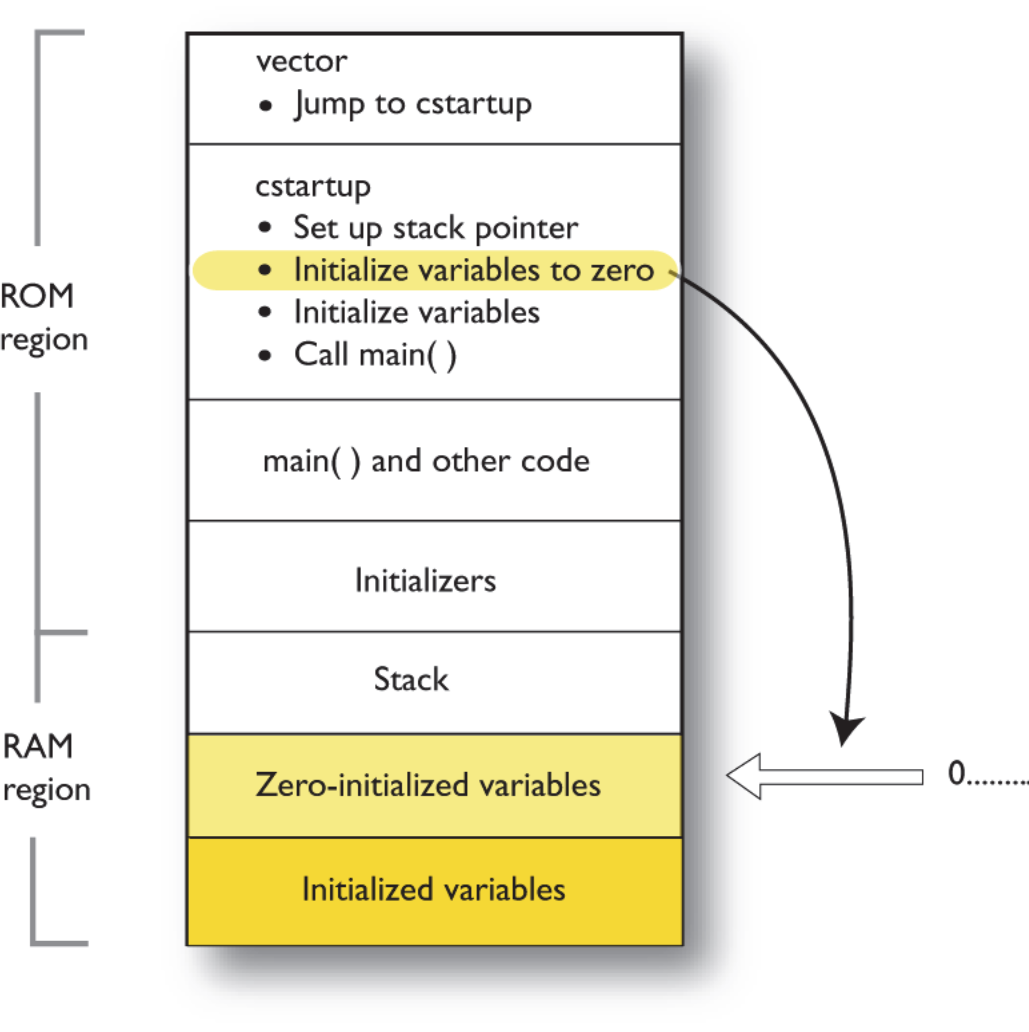
然后初始化初始值为0的存储在RAM中的全局和静态变量(比如 int i = 0;):
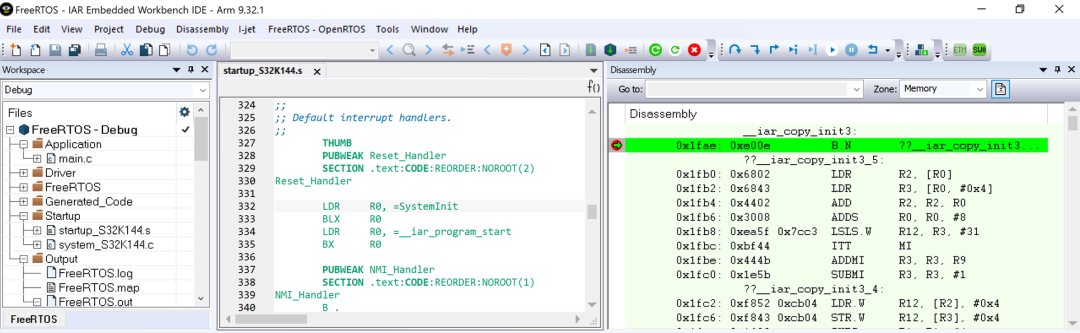
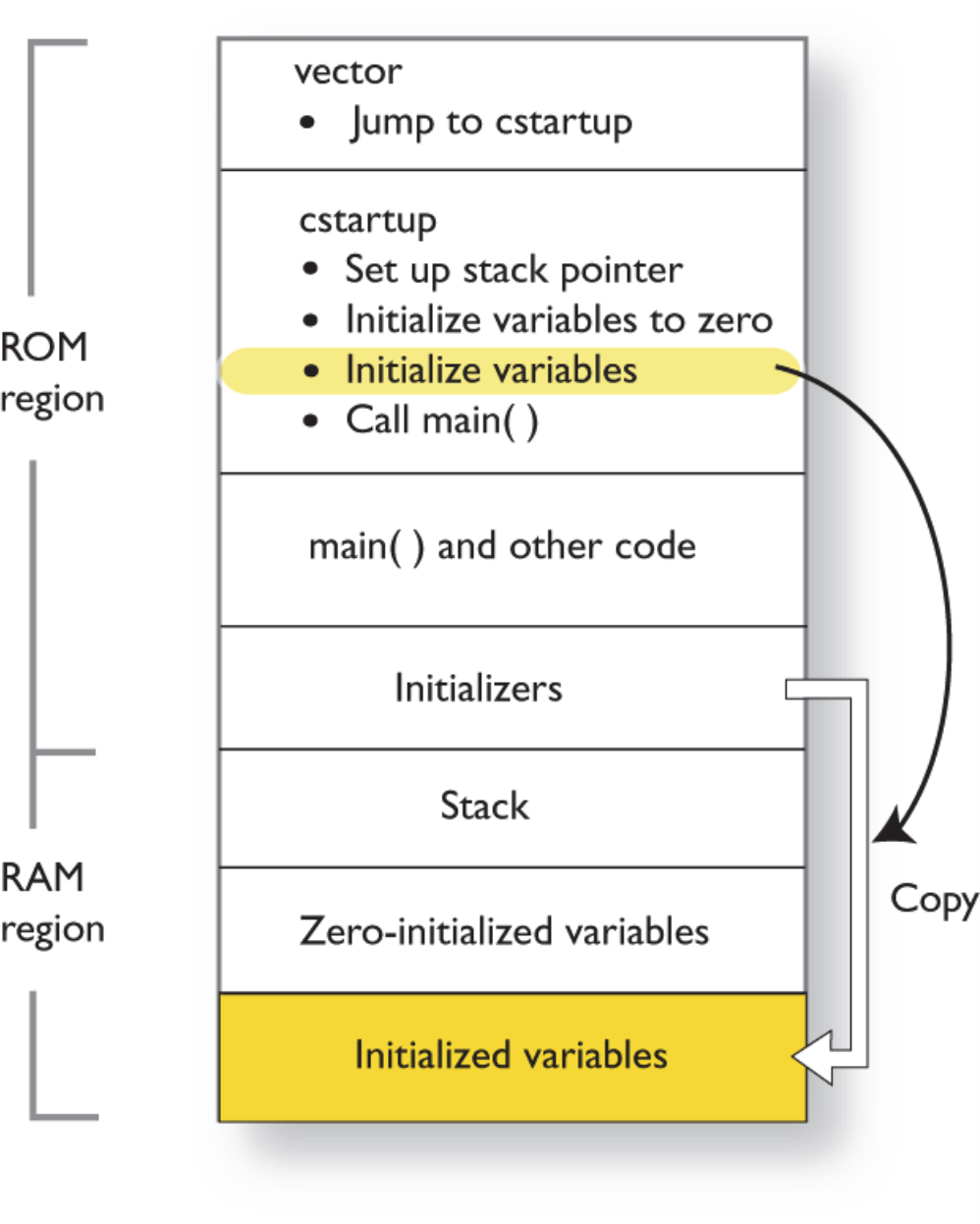
初始化初始值为非0的存储在RAM中的全局和静态变量(比如 int i = 1;),对应的初始值从相应的ROM拷贝到对应的RAM:
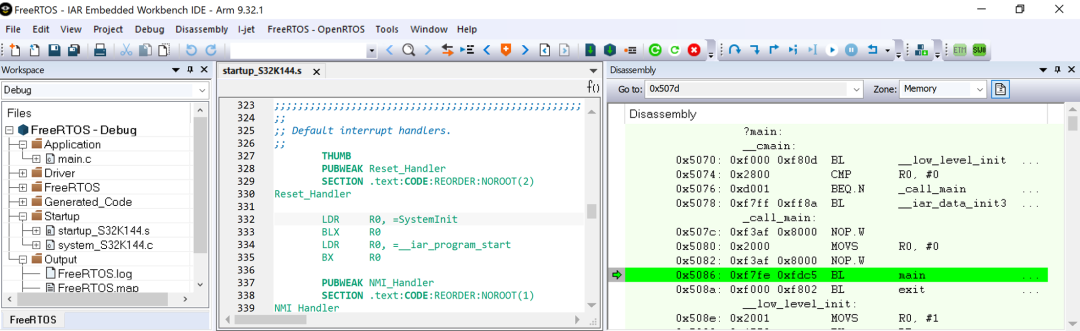
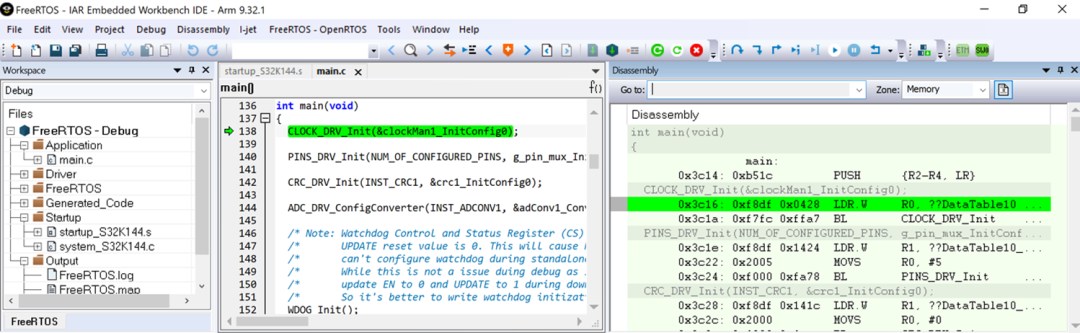
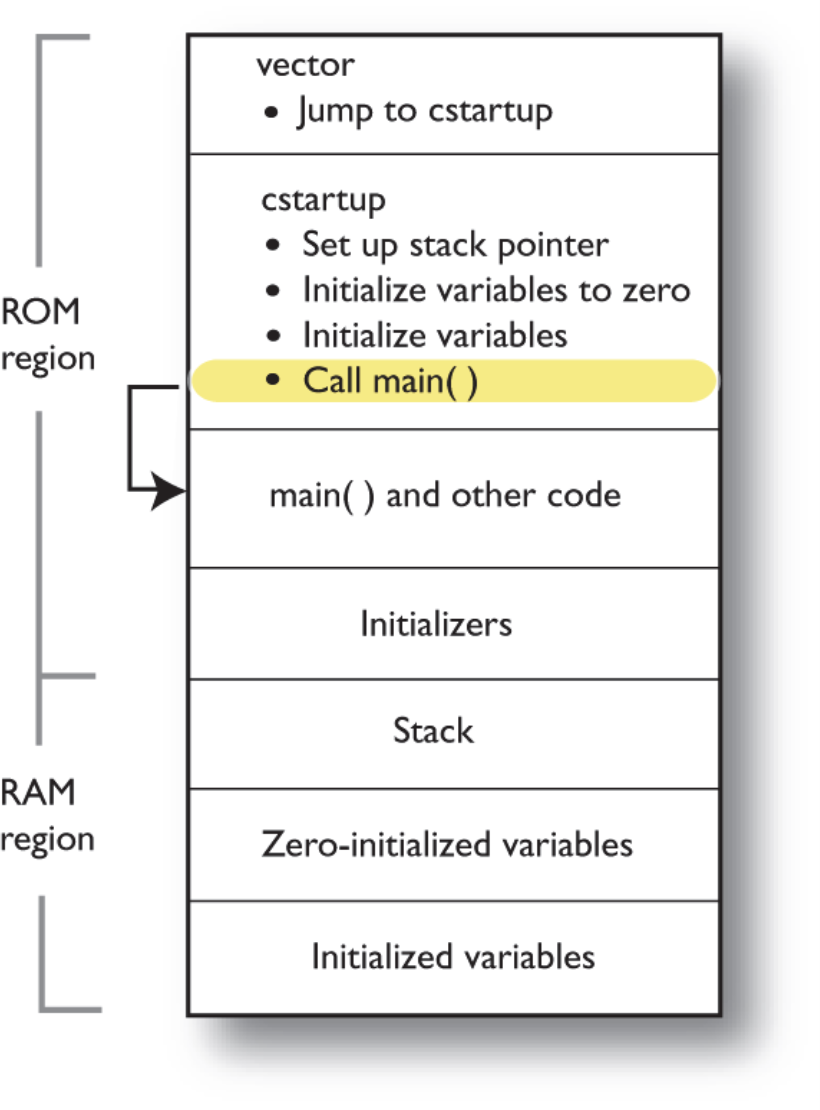
最后,调用main函数:
启动代码
通常情况下,如果ICF文件中添加了initialize by copy 命令,linker会自动选择并添加对应的启动代码来完成对应的启动过程。对应的启动代码通过库文件的方式进行link。对应的启动代码在安装目录arm\src\lib下面:
| 







 楼主
楼主