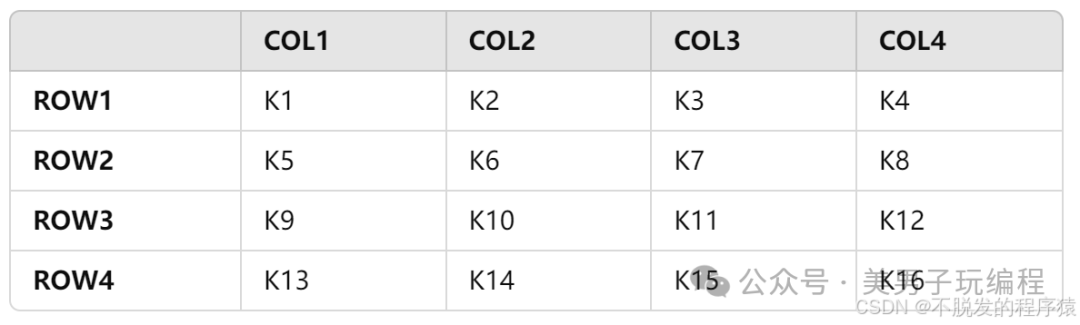
假设有一个4×4的矩阵按键,它由4行(Row)和4列(Column)组成,共16个按键。
通常,行连接到单片机的GPIO输出端,列连接到GPIO输入端,且列端口通常需要上拉电阻来保持默认高电平。
硬件连接示例:
1、矩阵按键的基本扫描方法
依次拉低每一行的电平,并读取列信号,判断是否有按键按下。
实现步骤:
- 设定所有行(Row)为高电平,所有列(Column)为输入模式,并上拉。
- 依次将每一行拉低(低电平),然后读取所有列的状态。
- 如果某列检测到低电平,说明该行与该列的交点处按键被按下。
- 记录按键位置,并等待去抖动处理。
- 继续扫描下一行,直到所有行扫描完毕。
示例代码(基于C语言):
- #define ROWS 4
- #define COLS 4
- constuint8_t row_pins[ROWS] = {ROW1, ROW2, ROW3, ROW4};
- constuint8_t col_pins[COLS] = {COL1, COL2, COL3, COL4};
- void scan_matrix_keypad() {
- for (int i = 0; i < ROWS; i++) {
- // 设定当前行为低电平
- gpio_write(row_pins[i], LOW);
- delay_us(5); // 确保稳定
- // 读取列状态
- for (int j = 0; j < COLS; j++) {
- if (gpio_read(col_pins[j]) == LOW) {
- printf("按键[%d,%d]被按下\n", i, j);
- }
- }
- // 恢复当前行为高电平
- gpio_write(row_pins[i], HIGH);
- }
- }
2、低功耗优化
如果单片机支持外部中断,可以利用外部中断检测按键按下,降低CPU负载。
方法如下:
- 初始状态:所有行设为高电平,所有列配置为带上拉输入,并开启中断。
- 进入低功耗模式,等待外部中断。
- 当按键按下时,列引脚的电平变化触发中断。
- 进入中断后,采用行列扫描法识别具体按键。
- 处理按键逻辑后,恢复低功耗状态。
示例代码(基于C语言):
- void EXTI_Handler() {
- for (int j = 0; j < COLS; j++) {
- if (gpio_read(col_pins[j]) == LOW) {
- scan_matrix_keypad(); // 仅在有按键按下时扫描
- break;
- }
- }
- }
- void setup() {
- for (int i = 0; i < ROWS; i++) {
- gpio_mode(row_pins[i], OUTPUT);
- gpio_write(row_pins[i], HIGH);
- }
- for (int j = 0; j < COLS; j++) {
- gpio_mode(col_pins[j], INPUT_PULLUP);
- attach_interrupt(col_pins[j], EXTI_Handler, FALLING);
- }
- }
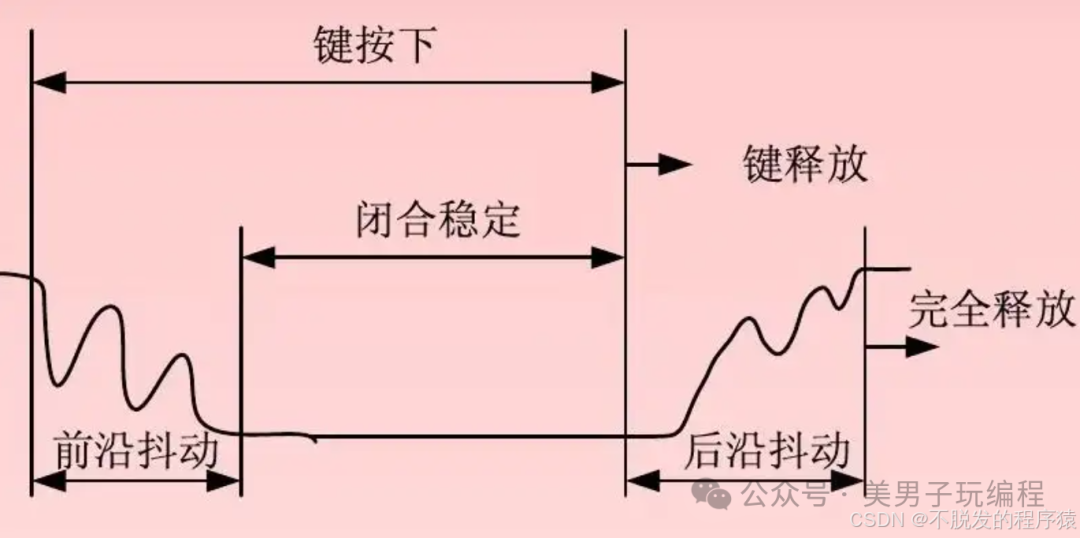
3、按键去抖动策略
按键在机械接触时会出现抖动,可能会误触发多次按键事件,因此需要去抖动处理。
3.1、软去抖动通过软件延迟来过滤抖动信号,例如检测到按键按下后,延迟20ms再次检测是否仍然按下。
- bool is_key_pressed(uint8_t row, uint8_t col) {
- if (gpio_read(col_pins[col]) == LOW) {
- delay_ms(20); // 20ms去抖
- if (gpio_read(col_pins[col]) == LOW) {
- return true;
- }
- }
- return false;
- }
3.2、硬件去抖动可在矩阵按键电路中增加一个小电容(如0.1uF)或者使用施密特触发器来稳定按键信号。
在资源受限的嵌入式系统中,如果单片机 没有足够的外部中断资源,可以使用 定时器 进行周期性扫描矩阵按键,以减少CPU占用。
同时,为了避免主循环(while(1))中阻塞等待按键事件,使用FIFO(First In, First Out)队列 存储按键事件,以提高系统响应速度。
4、进一步优化
基本原理:
- 定时器周期性触发扫描,间隔通常设为 10~20ms,以确保能及时捕获按键事件,同时避免过于频繁地占用CPU资源。
- 在定时器中断函数内,执行一次完整的行列扫描,如果检测到按键按下,则将其加入FIFO队列。
以下是基于 STM32 的 定时器中断方式 进行按键扫描的示例代码:
- #define ROWS 4
- #define COLS 4
- constuint8_t row_pins[ROWS] = {ROW1, ROW2, ROW3, ROW4};
- constuint8_t col_pins[COLS] = {COL1, COL2, COL3, COL4};
- // FIFO 队列结构体
- #define KEY_FIFO_SIZE 10
- typedefstruct {
- uint8_t keys[KEY_FIFO_SIZE]; // 按键事件队列
- uint8_t head; // 队列头
- uint8_t tail; // 队列尾
- } KeyFIFO;
- KeyFIFO key_fifo = {{0}, 0, 0};
- // 按键事件入队
- void key_fifo_enqueue(uint8_t key) {
- uint8_t next = (key_fifo.tail + 1) % KEY_FIFO_SIZE;
- if (next != key_fifo.head) { // 队列未满
- key_fifo.keys[key_fifo.tail] = key;
- key_fifo.tail = next;
- }
- }
- // 读取FIFO队列中的按键
- uint8_t key_fifo_dequeue() {
- if (key_fifo.head == key_fifo.tail) {
- return0; // 队列为空
- }
- uint8_t key = key_fifo.keys[key_fifo.head];
- key_fifo.head = (key_fifo.head + 1) % KEY_FIFO_SIZE;
- return key;
- }
- // 定时器中断回调函数,每10ms扫描按键
- void TIM2_IRQHandler() {
- for (int i = 0; i < ROWS; i++) {
- gpio_write(row_pins[i], LOW);
- delay_us(5); // 确保稳定
- for (int j = 0; j < COLS; j++) {
- if (gpio_read(col_pins[j]) == LOW) {
- uint8_t key_id = (i * COLS) + j + 1;
- key_fifo_enqueue(key_id);
- }
- }
- gpio_write(row_pins[i], HIGH);
- }
- TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除定时器中断标志
- }
- // 定时器初始化
- void timer2_init() {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- TIM_TimeBaseStructure.TIM_Period = 10000 - 1; // 10ms定时
- TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // 1MHz时钟
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
- TIM_Cmd(TIM2, ENABLE);
- NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- }
这样,我们就能在 低资源占用 和 高响应速度 之间取得 良好平衡,构建更高效的 单片机矩阵按键控制系统。
| 







 楼主
楼主