收藏0 举报
一般使用两个即可,通过KCL,Ia+Ib+Ic = 0,可以求解第三个相电流。
采样电阻
图 低端电阻采样方式
图 PID控制框图
公式介绍:
图 连续公式
图 离散公式
Kp-------比例常数
Ki= (Kp*T)/Ti------积分常数
Kd=(Kp*Td)/T------微分常数
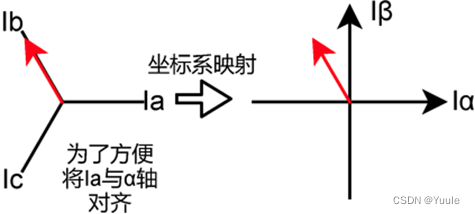
简化PMSM模型,使用禁止坐标系clark变换和同步旋转坐标Park变换
Clark
将自然坐标系abc变换到α-β坐标系
图 clark变换
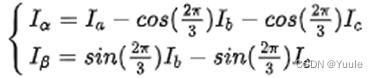
变换公式如下:
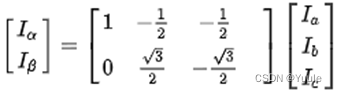
写成矩阵:
注:上述公式没有考虑约束条件,若变换前后幅值不变需要乘上系数2/3;若变换前后功率不变,系数则为sqrt(2/3)
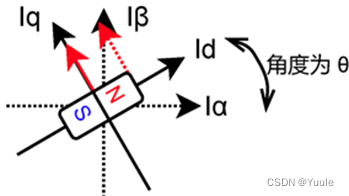
图 park变换
本版积分规则 发表回复 回帖并转播 回帖后跳转到最后一页
本站内容禁止未经授权用于AI模型训练。如需商业数据合作,请联系我们。
扫码关注 21ic 官方微信
扫码关注嵌入式微处理器
扫码关注电源系统设计
扫码关注21ic项目外包
扫码浏览21ic手机版
本站介绍 | 申请友情链接 | 欢迎投稿 | 隐私声明 | 广告业务 | 网站地图 | 联系我们 | 诚聘英才
京公网安备 11010802024343号








 楼主
楼主





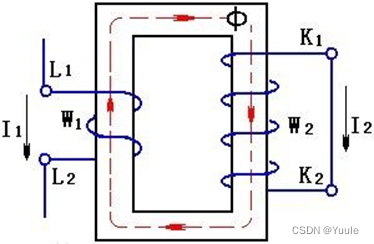
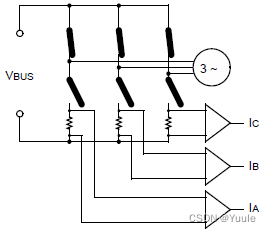
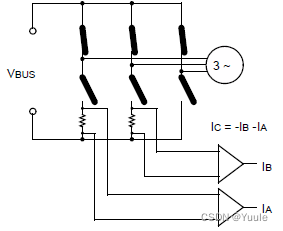
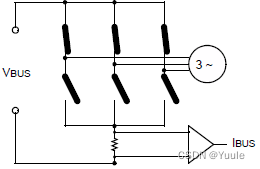
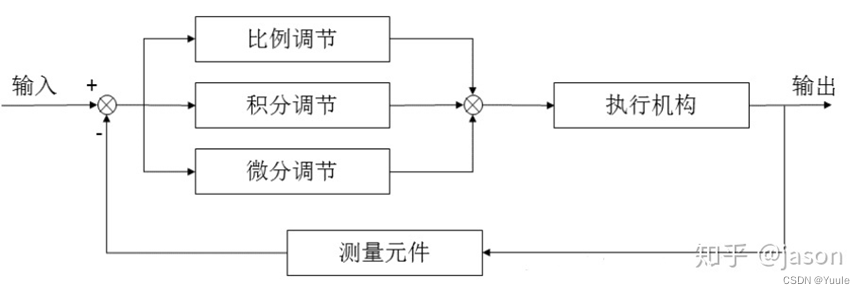 图 PID控制框图
图 PID控制框图