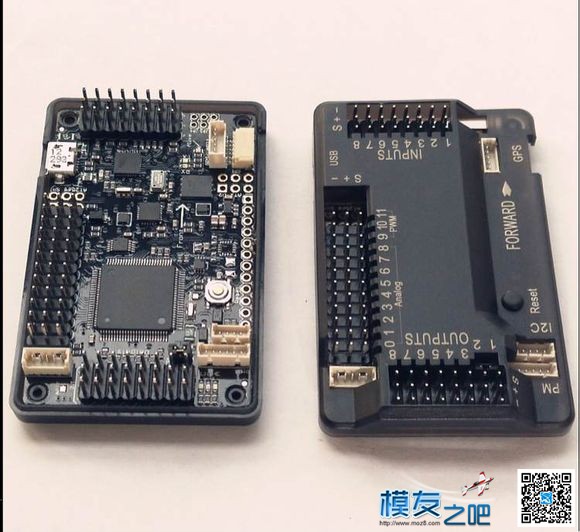
APM拿到手后首先要做的就是给它刷入你自己需要的固件,虽然卖家在销售前可能会帮你刷入固件,但是未必是符合你要求的固件,所以学会刷写APM的固件是你的必修课之一。
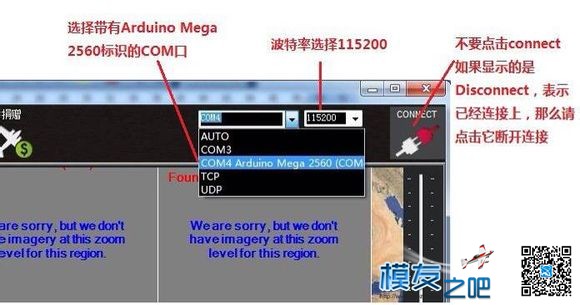
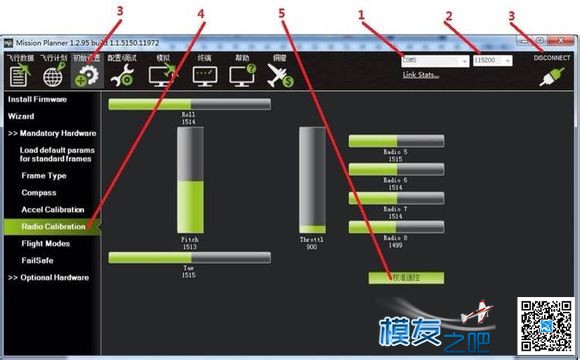
固件安装前请先连接APM的USB线到电脑(其它的可不用连接),确保电脑已经识别到APM的COM口号后,打开MP地面站,在MP主界面的右上方端口选择下拉框那里选择对应的COM口,一般正确识别的COM口都有Arduino Mega 2560标识,直接选择带这个标识的COM口,然后波特率选择115200,注意:请不要点击connect连接按钮,固件安装过程中程序会自行连接。如果你之前已经连接了APM,那么请点击Disconnect断开连接,否则固件安装过程中弹出错误提示
另外请注意:请不要用无线数传安装固件,虽然无线数传跟USB有着同样的通信功能,但它缺少reset信号,无法在刷固件的过程中给2560复位,会导致安装失败。
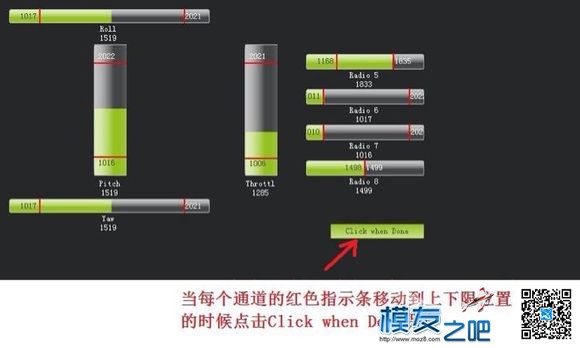
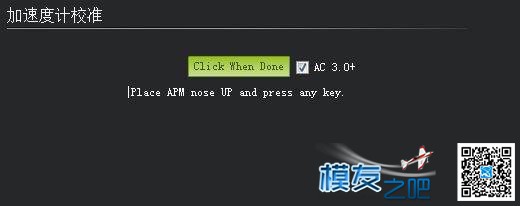
点击校准遥控后会依次弹出两个提醒:分别是确认你遥控发射端已经打开and接收机已经通电连接,确认你的电机没有通电(这点非常重要,做这步工作的时候建议你的APM只连接USB和接收机两个设备)然后点击OK开始拨动遥控开关,使每个通道的红色提示条移动到上下限的位置当每个通道的红色指示条移动到上下限位置的时候,点击Click when Done保存校准时候,弹出两个OK窗口后完成遥控器的校准。如果你拨动摇杆时上面的指示条没有变化,请检查接收机连接是否正确,另外同时检查下每个通道是否对应以及是否返舵。








 楼主
楼主