|
裸机调试时,需要使用到SDRAM,需要使用JTAG,首先将芯片启动方式设置为USB,然后安装USB驱动 “WinUSB4NuVCOM_NUC970”,最后运行软件 NuWriter 选择芯片 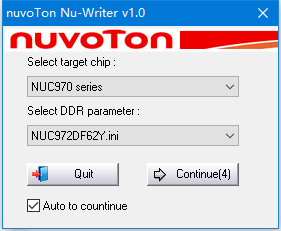
连接设备 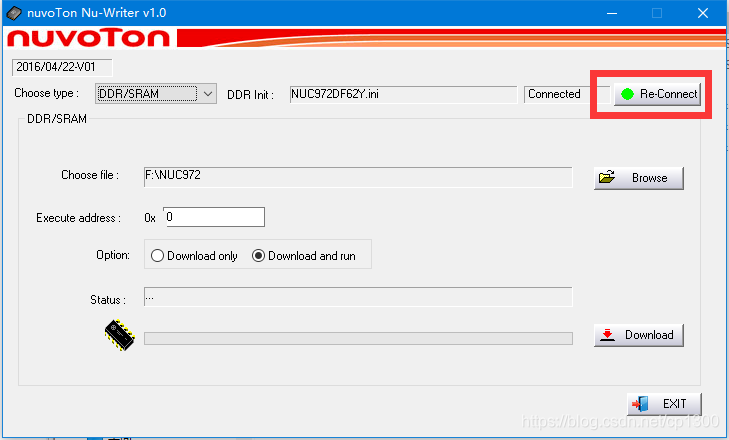
连接成功后串口会有提示 
还需要在MDK中添加DDR初始化脚本,我使用的是unlink2,不知道jlinkv9是否是一样的脚本 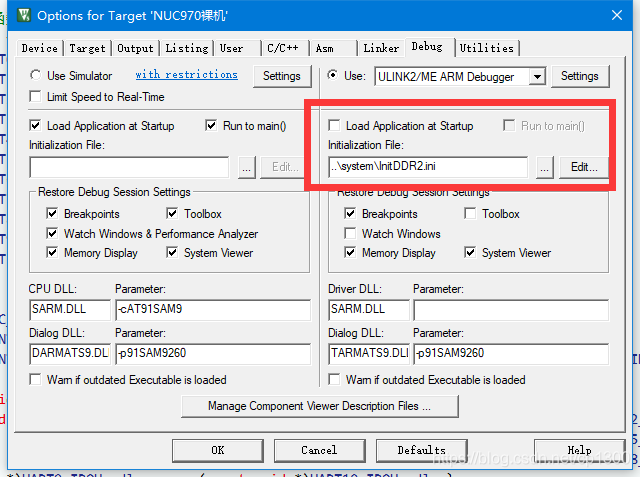
直接选择仿真,不要点击下载 串口测试将收到的数据原封不动发送回来,只测试过串口0,其余的串口理论上操作一样 
下面是代码
- /*************************************************************************************************************
- * 文件名: uart.c
- * 功能: NUC970 UART通讯支持
- * 作者: cp1300@139.com
- * 创建时间: 2020-08-29
- * 最后修改时间: 2020-08-29
- * 详细: 串口通信底层支持,可惜串口都不支持DMA传输,只能使用中断方式接收数据
- *************************************************************************************************************/
- #include "nuc970_system.h"
- #include "uart.h"
- #include "typedef.h"
- #include "irq_aic.h"
-
- //串口中断接收函数
- __inline static void UARTx_IRQHandler(UART_CH_Type ch); //串口中断处理
- static void UART0_IRQHandler(void) {UARTx_IRQHandler(UART_CH0);} //串口0接收中断
- static void UART1_IRQHandler(void) {UARTx_IRQHandler(UART_CH1);} //串口1接收中断
- static void UART2_IRQHandler(void) {UARTx_IRQHandler(UART_CH2);} //串口2接收中断
- static void UART3_IRQHandler(void) {UARTx_IRQHandler(UART_CH3);} //串口3接收中断
- static void UART4_IRQHandler(void) {UARTx_IRQHandler(UART_CH4);} //串口4接收中断
- static void UART5_IRQHandler(void) {UARTx_IRQHandler(UART_CH5);} //串口5接收中断
- static void UART6_IRQHandler(void) {UARTx_IRQHandler(UART_CH6);} //串口6接收中断
- static void UART7_IRQHandler(void) {UARTx_IRQHandler(UART_CH7);} //串口7接收中断
- static void UART8_IRQHandler(void) {UARTx_IRQHandler(UART_CH8);} //串口8接收中断
- static void UART9_IRQHandler(void) {UARTx_IRQHandler(UART_CH9);} //串口9接收中断
- static void UART10_IRQHandler(void) {UARTx_IRQHandler(UART_CH10);} //串口10接收中断
-
- //中断编号
- static const AIC_IRQ_Typedef scg_UartIrqType[UART_ChMax] =
- { AIC_UART0_INT, AIC_UART1_INT, AIC_UART2_INT, AIC_UART3_INT, AIC_UART4_INT,
- AIC_UART5_INT, AIC_UART6_INT, AIC_UART7_INT, AIC_UART8_INT, AIC_UART9_INT, AIC_UART10_INT};
- //中断函数集合
- static const void *scg_pUartIrqHandle[UART_ChMax] =
- {(const void *)UART0_IRQHandler, (const void *)UART1_IRQHandler, (const void *)UART2_IRQHandler,
- (const void *)UART3_IRQHandler, (const void *)UART4_IRQHandler, (const void *)UART5_IRQHandler,
- (const void *)UART6_IRQHandler, (const void *)UART7_IRQHandler, (const void *)UART8_IRQHandler,
- (const void *)UART9_IRQHandler, (const void *)UART10_IRQHandler};
- //串口基址
- static const u32 scg_UARTx_Base[UART_ChMax] =
- { UART0_BASE, UART1_BASE, UART2_BASE, UART3_BASE, UART4_BASE, UART5_BASE,
- UART6_BASE, UART7_BASE, UART8_BASE, UART9_BASE, UART10_BASE};
- //时钟使能
- static const SYS_DEV_CLOCK scg_UARTx_DeviceClockEnable[UART_ChMax] =
- { DEV_UART0, DEV_UART1, DEV_UART2, DEV_UART3, DEV_UART4, DEV_UART5,
- DEV_UART6, DEV_UART7, DEV_UART8, DEV_UART9, DEV_UART10};
- //外设复位
- static const SYS_DEV_RESET scg_UARTx_DeviceReset[UART_ChMax] =
- { DEV_RESET_UART0, DEV_RESET_UART1, DEV_RESET_UART2, DEV_RESET_UART3, DEV_RESET_UART4, DEV_RESET_UART5,
- DEV_RESET_UART6, DEV_RESET_UART7, DEV_RESET_UART8, DEV_RESET_UART9, DEV_RESET_UART10};
- //IO复用功能
- static const GPIO_AF_Type scg_UARTx_AF_GPIO[UART_ChMax][2] =
- {
- {GPIO_PE0_UART0_TXD, GPIO_PE1_UART0_RXD}, {GPIO_PE2_UART1_TXD, GPIO_PE3_UART1_RXD}, {GPIO_PF11_UART2_TXD, GPIO_PF12_UART2_RXD},
- {GPIO_PE12_UART3_TXD, GPIO_PE13_UART3_RXD}, {GPIO_PH8_UART4_TXD, GPIO_PH9_UART4_RXD}, {GPIO_PB0_UART5_TXD, GPIO_PB1_UART5_RXD},
- {GPIO_PB2_UART6_TXD, GPIO_PB3_UART6_RXD}, {GPIO_PG4_UART7_TXD, GPIO_PG5_UART7_RXD}, {GPIO_PH12_UART8_TXD, GPIO_PH13_UART8_RXD},
- {GPIO_PD14_UART9_TXD, GPIO_PD15_UART9_RXD}, {GPIO_PB12_UART10_TXD, GPIO_PB13_UART10_RXD}
- };
-
-
-
- //相关UART状态结构
- typedef struct
- {
- bool isNewDataFlag; //接收到新数据
- bool isBuffFull; //接收Buff满
- bool isIntRx; //是否开启中断接收
- u8 *RxBuff; //接收Buff指针
- u16 RxBuffSize; //接收缓冲区大小,一帧数据大小
- u16 UartRxCnt; //接收数据计数器
- u8 TempData; //用于接收溢出后读取数据寄存器,清除读取数据标志
- } UartRx_TypeDef;
- static UartRx_TypeDef sg_UartRx[UART_ChMax];
-
- /*************************************************************************************************************************
- *函数 : bool UARTx_Config(UART_CH_Type ch,UART_Config_TypeDef * cfg)
- *功能 : 串口配置
- *参数 : ch:串口号;cfg:配置结构体
- *返回 : TRUE:配置成功; FALSE: 配置失败
- *依赖 : 底层宏定义
- *作者 : cp1300@139.com
- *时间 : 2020-08-11
- *最后修改时间 : 2020-08-30
- *说明 : 配置前最好确保数据已经发送完成,没有数据正在发送
- *************************************************************************************************************************/
- bool UARTx_Config(UART_CH_Type ch,UART_Config_TypeDef * cfg)
- {
- u32 temp;
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
-
- temp = 0;
- //奇偶校验
- switch(cfg->OddEvenVerify)
- {
- case UART_ODD: //奇校验
- {
- temp |= BIT3; //使能奇偶校验-校验位发送
- }break;
- case UART_EVEN: //偶校验
- {
- temp |= BIT4; //偶校验
- temp |= BIT3; //使能奇偶校验-校验位发送
- }break;
- default:break; //无校验
- }
- //停止位
- if(cfg->StopBitWidth != UART_STOP_1BIT) //不止1个停止位
- {
- temp |= BIT2; //当选择6位,7位和8位字长时,将生成两个“ STOP位”
- }
- //数据长度
- temp |= cfg->DataBitWidth & 0x03; //数据位长度设置
-
- while((UARTx->FSR & BIT28) == 0); //等待发送移位寄存器为空,等待数据发送完成再进行配置
- UARTx->LCR = temp;
-
- return TRUE;
- }
-
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_SetBaudRate(UART_CH_Type ch,u32 baud)
- * 功能 : 串口波特率设置
- * 参数 : ch:通道选择,baud:波特率,如9600,115200等等
- * 返回 : 无
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 2013316
- * 最后修改时间 : 2013316
- * 说明 : USART1~UART5,对应通道UART_CH1-UART_CH5
- 设置前必须关闭串口
- 会自动获取系统当前的时钟,并进行计算.
- *************************************************************************************************************************/
- bool UARTx_SetBaudRate(UART_CH_Type ch,u32 baud)
- {
- u32 temp = 0;
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
- temp = 12000000; //获取系统时钟
- temp = temp / baud; //计算波特率分频系数
- temp -= 2;
- if(temp < 9) temp = 9;
- temp |= 0x03 << 28; //DIV_X_EN=1 DIV_X_ONE=1 模式3 波特率=时钟/(A+2), A 必须大于9
-
- while((UARTx->FSR & BIT28) == 0); //等待发送移位寄存器为空,等待数据发送完成再进行配置
- UARTx->BAUD = temp;
-
- return TRUE;
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : bool UARTx_Init(UART_CH_Type ch,u32 Speed,bool isEnableRx)
- * 功能 : 串口初始化
- * 参数 : ch:通道选择,0->usart1,Speed:串口速度,isEnableRx:是否使能接收
- * 返回 : TRUE:成功,FALSE:失败
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 2020-08-17
- * 说明 :
- *************************************************************************************************************************/
- bool UARTx_Init(UART_CH_Type ch,u32 Speed,bool isEnableRx)
- {
- UART_Config_TypeDef cfg;
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
-
- SYS_DeviceClockEnable(scg_UARTx_DeviceClockEnable[ch], TRUE); //使能时钟
- SYS_DeviceReset(scg_UARTx_DeviceReset[ch]); //复位外设
-
- UARTx->IER = 0; //关闭所有中断
- UARTx->FCR = (5<<4) | BIT2 | BIT1; //接收FIFO阈值46/14,开启接收,收发FIFO复位
- if(isEnableRx) //是否使能接收-禁用接收
- {
- UARTx->IER = BIT11 | BIT4 | BIT0; //开启接收超时计数器,开启接收超时中断,使能接收数据有效中断
- }
- else
- {
- AIC_IrqEnable(scg_UartIrqType[ch], FALSE); //关闭串口AIC中断
- }
- //配置
- UARTx->TOR = (0<<8) | (6*10); //发送字节延时为0,接收超时计数器为6个字节时间
- cfg.DataBitWidth = UART_DATA_8BIT; //数据宽度8
- cfg.OddEvenVerify = UART_VERIFY_NULL; //无奇偶校验
- cfg.StopBitWidth = UART_STOP_1BIT; //1个停止位
- if(UARTx_SetBaudRate(ch, Speed) == FALSE) return FALSE; //设置波特率
- if(UARTx_Config(ch, &cfg) == FALSE) return FALSE; //设置串口数据格式
- sg_UartRx[ch].isIntRx = FALSE; //没有开启中断接收
-
- //IO初始化
- SYS_GPIOx_SetAF(scg_UARTx_AF_GPIO[ch][0]); //TXD 复用功能设置
- SYS_GPIOx_SetAF(scg_UARTx_AF_GPIO[ch][1]); //RXD 复用功能设置
- if(isEnableRx)
- {
- UARTx->ISR = UARTx->ISR; //清除中断信息
- AIC_SetIrqTriggered(scg_UartIrqType[ch], AIC_HIGHT_EDGE); //设置串口中断上升沿触发
- AIC_SetIrqPriority(scg_UartIrqType[ch], UART_INT_PRIO); //设置一个中断优先级
- AIC_RegisterIRQHandler(scg_UartIrqType[ch], (void (*)(void))scg_pUartIrqHandle[ch]); //注册中断服务程序
- AIC_IrqEnable(scg_UartIrqType[ch], TRUE); //开启串口AIC中断
-
- sg_UartRx[ch].isIntRx = FALSE; //开启了中断接收
- }
-
- return TRUE;
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_SendByte(UART_CH_Type ch,u8 data)
- * 功能 : UART单字节发送
- * 参数 : ch:通道号,dataL:要发送的数据
- * 返回 : 无
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 2020-08-12
- * 说明 : 单字节发送不要使用DMA,浪费
- *************************************************************************************************************************/
- void UARTx_SendByte(UART_CH_Type ch,u8 data)
- {
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
- while(UARTx->FSR & BIT23); //等待TX FIFO未满
- UARTx->RBR_THR = data; //发送数据-写到FIFO中而已,并不会等待数据发送完成
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_SendData(UART_CH_Type ch,u8 *tx_buff,u16 byte_number)
- * 功能 : UART数据发送函数
- * 参数 : ch:通道号,tx_buff:发送缓冲区,byte_number:需要发送的字节
- * 返回 : 无
- * 依赖 : void UART_SendByte(u8 ch,u8 data)
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 20120403
- * 说明 :
- *************************************************************************************************************************/
- void UARTx_SendData(UART_CH_Type ch,u8 *pTxBuff,u16 DataLen)
- {
- u16 i;
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
-
- for(i = 0;i < DataLen;i++) //循环发送,直至发送完毕
- {
- UARTx_SendByte(ch, pTxBuff[i]);
- }
- #if (!UART_TX_TO_FIFI) //要求等待数据发送完成
- UARTx_WaitSendComplete(ch); //等待数据发送完成-从串口发送完成
- #endif //UART_TX_TO_FIFI
- }
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_WaitSendComplete(UART_CH_Type ch)
- * 功能 : 等待数据发送完成-从串口发送完成
- * 参数 : ch:通道号
- * 返回 : 无
- * 依赖 : 无
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-29
- * 最后修改时间 : 2020-08-29
- * 说明 :
- *************************************************************************************************************************/
- void UARTx_WaitSendComplete(UART_CH_Type ch)
- {
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
- while((UARTx->FSR & BIT28) == 0); //等待发送移位寄存器为空
- }
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_SendString(UART_CH_Type ch,char *pString)
- * 功能 : UART发送字符串
- * 参数 : ch:通道号
- pString:字符串指针
- * 返回 : 无
- * 依赖 : void UART_SendByte(u8 ch,u8 data)
- * 作者 : cp1300@139.com
- * 时间 : 2013-04-18
- * 最后修改时间 : 2013-04-18
- * 说明 : 非DMA方式,非FIFO方式发送
- *************************************************************************************************************************/
- #include "string.h"
- void UARTx_SendString(UART_CH_Type ch,char *pString)
- {
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
-
- UARTx_SendData(ch, (u8 *)pString, strlen(pString));
- }
-
-
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : bool UARTx_GetNewDataFlag(UART_CH_Type ch)
- * 功能 : 获取串口新数据标志
- * 参数 : ch:通道选择
- * 返回 : TRUE:成功,FALSE:失败
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 20120403
- * 说明 : 用于判断是否有新的数据,会清除掉新数据标志的
- *************************************************************************************************************************/
- bool UARTx_GetNewDataFlag(UART_CH_Type ch)
- {
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
-
- if(sg_UartRx[ch].isIntRx == TRUE) //开启了中断接收
- {
- if(sg_UartRx[ch].isNewDataFlag == TRUE) //有新数据
- {
- sg_UartRx[ch].isNewDataFlag = FALSE; //清除标志
- return TRUE; //返回有新数据
- }
- }
- else //没开启中断接收
- {
- if((UARTx->FSR & BIT14) == 0) //接收FIFO不为空
- {
- return TRUE;
- }
- }
- return FALSE;
- }
-
-
- /*************************************************************************************************************************
- * 函数 : bool UARTx_GetRxBuffFullFlag(UART_CH_Type ch)
- * 功能 : 获取串口接收缓冲区满标志
- * 参数 : ch:通道选择
- * 返回 : TRUE:成功,FALSE:失败
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 20120403
- * 说明 : 用于判断接收缓冲区是否满,会清除标志
- *************************************************************************************************************************/
- bool UARTx_GetRxBuffFullFlag(UART_CH_Type ch)
- {
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
-
- if(sg_UartRx[ch].isBuffFull == TRUE) //缓冲区已满
- {
- sg_UartRx[ch].isBuffFull = FALSE; //清除满标志
- return TRUE;
- }
- return FALSE;
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : u8 UARTx_GetNewData(UART_CH_Type ch)
- * 功能 : 获取串口新数据
- * 参数 : ch:通道选择
- * 返回 : 收到的数据
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 20120403
- * 说明 : 用于接收一个字节数据
- *************************************************************************************************************************/
- u8 UARTx_GetNewData(UART_CH_Type ch)
- {
- UART_TypeDef *UARTx;
-
- if(ch > (UART_ChMax - 1)) return FALSE; //端口号超出范围
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
-
- return UARTx->RBR_THR; //返回数据
- }
-
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_SetRxBuff(UART_CH_Type ch,u8 *RxBuff,u16 RxBuffSize)
- * 功能 : 设置串口接收缓冲区
- * 参数 : ch:通道选择,RxBuffSize:缓冲区大小,RxBuff:缓冲区指针
- * 返回 : 无
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20120403
- * 最后修改时间 : 20120403
- * 说明 : 一定要设置,否则开启中断接收时可能会异常
- *************************************************************************************************************************/
- void UARTx_SetRxBuff(UART_CH_Type ch,u8 *RxBuff,u16 RxBuffSize)
- {
- #ifdef _UCOS_II_
- OS_CRITICAL_SR_VAL;
- #endif //_UCOS_II_
-
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
-
- #ifdef _UCOS_II_
- OS_EnterCriticalSection(); //进入临界区
- #endif //_UCOS_II_
- sg_UartRx[ch].RxBuffSize = RxBuffSize; //设置缓冲区大小
- sg_UartRx[ch].RxBuff = RxBuff; //设置缓冲区指针
- sg_UartRx[ch].UartRxCnt = 0; //计数器清零
- #ifdef _UCOS_II_
- OS_LeaveCriticalSection(); //退出临界区
- #endif //_UCOS_II_
- }
-
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : u32 UARTx_GetRxCnt(UART_CH_Type ch)
- * 功能 : 获取串口接收数据计数器
- * 参数 : ch:通道选择
- * 返回 : 接收到的数据数量
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20130307
- * 最后修改时间 : 20130307
- * 说明 : 无
- *************************************************************************************************************************/
- u32 UARTx_GetRxCnt(UART_CH_Type ch)
- {
- if(ch > (UART_ChMax - 1)) return 0; //端口号超出范围
-
- return sg_UartRx[ch].UartRxCnt; //返回计数值
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : void UARTx_ClearRxCnt(UART_CH_Type ch)
- * 功能 : 清除串口接收数据计数器
- * 参数 : ch:通道选择
- * 返回 : 无
- * 依赖 : 底层宏定义
- * 作者 : cp1300@139.com
- * 时间 : 20130307
- * 最后修改时间 : 20130307
- * 说明 : 无
- *************************************************************************************************************************/
- void UARTx_ClearRxCnt(UART_CH_Type ch)
- {
- if(ch > (UART_ChMax - 1)) return; //端口号超出范围
- sg_UartRx[ch].UartRxCnt = 0; //计数器清零
- }
-
-
-
- //用于串口中断中循环读取数据
- __inline static void UARTx_ReadRxData(UART_CH_Type ch, UART_TypeDef *UARTx)
- {
- while((UARTx->FSR & BIT14) == 0) //接收FIFO中有数据,循环读取
- {
- if((sg_UartRx[ch].RxBuffSize) > 0 && (sg_UartRx[ch].UartRxCnt < sg_UartRx[ch].RxBuffSize)) //接收缓冲区大于0,并且没有满
- {
- (sg_UartRx[ch].RxBuff)[(sg_UartRx[ch].UartRxCnt) ++] = UARTx->RBR_THR; //将数据存放到缓冲区
- if(sg_UartRx[ch].UartRxCnt == sg_UartRx[ch].RxBuffSize) //缓冲区已满
- {
- //sg_UartRx[ch].UartRxCnt = 0; //接收计数器清零
- sg_UartRx[ch].isBuffFull = TRUE; //缓冲区已满标志
- }
- }
- else //缓冲区满了,清除接收到的数据
- {
- sg_UartRx[ch].TempData = UARTx->RBR_THR;
- }
- }
- }
-
-
-
- //串口中断处理
- __inline static void UARTx_IRQHandler(UART_CH_Type ch)
- {
- UART_TypeDef *UARTx;
-
- UARTx = (UART_TypeDef *) scg_UARTx_Base[ch]; //获取设备基址
- if(UARTx->ISR & BIT0) //FIFO收到指定数据的数据了
- {
- UARTx_ReadRxData(ch, UARTx);
- }
-
- if(UARTx->ISR & BIT4) //FIFO有数据,但是收到足够数据并且超时了,需要去除余下的数据
- {
- UARTx_ReadRxData(ch, UARTx); //收到的数据没有满足FIFO阈值
- }
-
- UARTx->ISR = UARTx->ISR; //清除中断
- }
-
- /*************************************************************************************************************
- * 文件名: uart.h
- * 功能: NUC970 UART通讯支持
- * 作者: cp1300@139.com
- * 创建时间: 2020-08-29
- * 最后修改时间: 2020-08-29
- * 详细: 串口通信底层支持
- *************************************************************************************************************/
- #ifndef _UART_H_
- #define _UART_H_
- #include "nuc970_system.h"
-
- /***********************配置相关************************/
- #define UART_TX_TO_FIFI 1 //1:数据发送到发送FIFO则认为发送完成; 0:数据从移位寄存器发送完成则认为发送完成
- #define UART_ChMax 11 //串口通道数量
- #define UART_INT_PRIO 3 //中断优先级,1-7
-
- /*********************************************************/
-
-
-
- //串口选择,串口1开始,到串口3
- typedef enum
- {
- UART_CH0 = 0, //UART0
- UART_CH1 = 1, //UART1-高速
- UART_CH2 = 2, //UART2-高速
- UART_CH3 = 3, //UART3
- UART_CH4 = 4, //UART4-高速
- UART_CH5 = 5, //UART5
- UART_CH6 = 6, //UART6-高速
- UART_CH7 = 7, //UART7
- UART_CH8 = 8, //UART8-高速
- UART_CH9 = 9, //UART9
- UART_CH10 = 10, //UART10
- }UART_CH_Type;
-
-
- //UART配置相关结构定义
- typedef struct
- {
- u8 OddEvenVerify; //奇偶校验,奇,偶,无
- u8 StopBitWidth; //停止位位宽1,2
- u8 DataBitWidth; //数据位宽度
- } UART_Config_TypeDef;
-
-
- //奇偶校验
- #define UART_VERIFY_NULL 0 //无校验
- #define UART_ODD 1 //奇校验
- #define UART_EVEN 2 //偶校验
- //停止位
- #define UART_STOP_1BIT 0 //一个停止位
- #define UART_STOP_2BIT 1 //2个停止位
- //数据位数
- #define UART_DATA_5BIT 0 //5位数据长度
- #define UART_DATA_6BIT 1 //6位数据长度
- #define UART_DATA_7BIT 2 //7位数据长度
- #define UART_DATA_8BIT 3 //8位数据长度
-
- //相关API
- bool UARTx_Init(UART_CH_Type ch,u32 Speed, bool isEnableRx); //串口初始化
- void UARTx_SendByte(UART_CH_Type ch,u8 data); //UART单字节发送
- void UARTx_SendData(UART_CH_Type ch,u8 *pTxBuff,u16 DataLen); //UART数据发送函数
- void UARTx_WaitSendComplete(UART_CH_Type ch); //等待数据发送完成-从串口发送完成
- void UARTx_SendString(UART_CH_Type ch,char *pString); //UART发送字符串
- bool UARTx_GetNewDataFlag(UART_CH_Type ch); //获取串口新数据标志
- bool UARTx_GetRxBuffFullFlag(UART_CH_Type ch); //获取串口接收缓冲区满标志
- u8 UARTx_GetNewData(UART_CH_Type ch); //获取串口新数据
- void UARTx_SetRxBuff(UART_CH_Type ch,u8 *RxBuff,u16 RxBuffSize); //设置串口接收缓冲区
- void UARTx_ClearRxInt(UART_CH_Type ch); //清除串口接收中断标志
- u32 UARTx_GetRxCnt(UART_CH_Type ch); //获取串口接收数据计数器
- void UARTx_ClearRxCnt(UART_CH_Type ch); //清除串口接收数据计数器
-
- #endif //_UART_H_
-
-
- /*************************************************************************************************************
- * 文件名: irq_aic.c
- * 功能: NUC970 中断控制器
- * 作者: cp1300@139.com
- * 创建时间: 2020-08-30
- * 最后修改时间: 2020-08-30
- * 详细: 中断控制器驱动
- *************************************************************************************************************/
- #include "nuc970_system.h"
- #include "irq_aic.h"
- #include "typedef.h"
-
- static void NULL_IRQHandler(void){}; //一个空的中断服务程序
- static void *sg_IRQHandlerTable[NUMBER_OF_INT_VECTORS]; //中断服务程序入口列表
- static bool sg_AIC_InitStatus = FALSE; //AIC初始化状态,防止重复初始化
-
-
- /*************************************************************************************************************************
- * 函数 : void AIC_Init(void)
- * 功能 : AIC中断控制器初始化(在系统初始化中调用,请勿重复调用)
- * 参数 : 无
- * 返回 : 无
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 初始化屏蔽所有中断,设置所有中断优先级为最低,并初始化所有中断服务程序入口
- 请不要重复初始化
- *************************************************************************************************************************/
- void AIC_Init(void)
- {
- u32 i;
-
- if(sg_AIC_InitStatus == TRUE) return;
- for(i = 0;i < NUMBER_OF_INT_VECTORS;i ++)
- {
- sg_IRQHandlerTable[i] = NULL_IRQHandler; //设置默认的中断函数
- AIC_ClearIrqActive((AIC_IRQ_Typedef) i); //AIC软件中断激活状态清除
- AIC_IrqEnable((AIC_IRQ_Typedef)i, FALSE); //设置一个中断使能状态-关闭
- AIC_SetIrqTriggered((AIC_IRQ_Typedef)i, AIC_LOW_LEVEL); //设置一个中断触发方式-低电平触发
- AIC_SetIrqPriority((AIC_IRQ_Typedef)i, 7); //设置一个中断优先级-最低优先级
- }
- sg_AIC_InitStatus = TRUE; //已经初始化了
- AIC->EOSCR = 1; //写入任何值,告诉AIC中断执行完毕了,防止之前有未退出的中断
- }
-
-
-
- /*************************************************************************************************************************
- * 函数 : void AIC_RegisterIRQHandler(AIC_IRQ_Typedef AIC_IRQ_n, void (*pIRQHandler)(void))
- * 功能 : 注册中断服务程序
- * 参数 : AIC_IRQ_n:中断源;pIRQHandler:中断服务程序
- * 返回 : 无
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 :
- *************************************************************************************************************************/
- void AIC_RegisterIRQHandler(AIC_IRQ_Typedef AIC_IRQ_n, void (*pIRQHandler)(void))
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- if(pIRQHandler == NULL) //无效的,则使用默认的替代,防止为空
- {
- sg_IRQHandlerTable[AIC_IRQ_n] = (void *)NULL_IRQHandler;
- }
- else
- {
- sg_IRQHandlerTable[AIC_IRQ_n] = (void *)pIRQHandler;
- }
- }
-
-
-
-
- /*************************************************************************************************************************
- * 函数 : void AIC_SetIrqTriggered(AIC_IRQ_Typedef AIC_IRQ_n, AIC_IntType AIC_INT_Triggered)
- * 功能 : 设置一个中断触发方式
- * 参数 : AIC_IRQ_n:中断源;AIC_INT_Triggered:触发方式,见AIC_IntType
- * 返回 : 无
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 :
- *************************************************************************************************************************/
- void AIC_SetIrqTriggered(AIC_IRQ_Typedef AIC_IRQ_n, AIC_IntType AIC_INT_Triggered)
- {
- u8 n,i;
- u32 temp;
-
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- n = AIC_IRQ_n / 4;
- i = AIC_IRQ_n % 4;
-
- temp = AIC->SCR[n];
- temp &= ~(0x03 << (i*8 + 6)); //清除之前配置
- temp |= (AIC_INT_Triggered & 0x03) << (i*8 + 6); //重新配置
- AIC->SCR[n] = temp;
- }
-
- /*************************************************************************************************************************
- * 函数 : void AIC_SetIrqPriority(AIC_IRQ_Typedef AIC_IRQ_n, u8 AIC_INT_Prio)
- * 功能 : 设置一个中断优先级
- * 参数 : AIC_IRQ_n:中断源;AIC_INT_Prio:优先级0-7
- * 返回 : 无
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 优先级0会变为快速中断
- *************************************************************************************************************************/
- void AIC_SetIrqPriority(AIC_IRQ_Typedef AIC_IRQ_n, u8 AIC_INT_Prio)
- {
- u8 n,i;
- u32 temp;
-
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- n = AIC_IRQ_n / 4;
- i = AIC_IRQ_n % 4;
-
- if(AIC_INT_Prio > 7) AIC_INT_Prio = 7; //优先级限制最低为7
- temp = AIC->SCR[n];
- temp &= ~(0x07 << (i*8 + 0)); //清除之前配置
- temp |= (AIC_INT_Prio & 0x07) << (i*8 + 0); //重新配置
- AIC->SCR[n] = temp;
- }
-
- /*************************************************************************************************************************
- * 函数 : bool AIC_GetIrqRawStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- * 功能 : 获取中断原始触发状态
- * 参数 : AIC_IRQ_n:中断源
- * 返回 : TRUE:中断已经触发;FALSE:中断未触发
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 获取的是每个中断通道内的内部状态,不受中断屏蔽影响
- *************************************************************************************************************************/
- bool AIC_GetIrqRawStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return FALSE;
- if(AIC->IRSR[AIC_IRQ_n/32] & (1 << (AIC_IRQ_n%32)))
- {
- return TRUE;
- }
- else
- {
- return FALSE;
- }
- }
-
-
- /*************************************************************************************************************************
- * 函数 : bool AIC_GetIrqActiveStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- * 功能 : 获取中断活动状态
- * 参数 : AIC_IRQ_n:中断源
- * 返回 : TRUE:中断已经激活;FALSE:中断未激活
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 不受中断屏蔽影响
- *************************************************************************************************************************/
- bool AIC_GetIrqActiveStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return FALSE;
- if(AIC->IASR[AIC_IRQ_n/32] & (1 << (AIC_IRQ_n%32)))
- {
- return TRUE;
- }
- else
- {
- return FALSE;
- }
- }
-
-
- /*************************************************************************************************************************
- * 函数 : bool AIC_GetIrqStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- * 功能 : 获取中断状态(中断使能并有效的状态)
- * 参数 : AIC_IRQ_n:中断源
- * 返回 : TRUE:中断有效;FALSE:中断无效
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 会受到中断屏蔽影响
- *************************************************************************************************************************/
- bool AIC_GetIrqStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return FALSE;
- if(AIC->ISR[AIC_IRQ_n/32] & (1 << (AIC_IRQ_n%32)))
- {
- return TRUE;
- }
- else
- {
- return FALSE;
- }
- }
-
-
- /*************************************************************************************************************************
- * 函数 : u8 AIC_GetThisIntIRQorFIQ(void)
- * 功能 : 获取当前的中断是IRQ还是FIQ
- * 参数 : 无
- * 返回 : 0:无中断;1:IRQ;2:FIQ
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 :
- *************************************************************************************************************************/
- u8 AIC_GetThisIntIRQorFIQ(void)
- {
- if(AIC->OISR & BIT1) return 1;
- else if(AIC->OISR & BIT0) return 2;
- else return 0;
- }
-
-
- /*************************************************************************************************************************
- * 函数 : bool AIC_GetIrqEnableStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- * 功能 : 获取中断使能状态
- * 参数 : AIC_IRQ_n:中断源
- * 返回 : TRUE:中断使能;FALSE:中断关闭
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 : 获取对应中断开关状态
- *************************************************************************************************************************/
- bool AIC_GetIrqEnableStatus(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return FALSE;
- if(AIC->IMR[AIC_IRQ_n/32] & (1 << (AIC_IRQ_n%32)))
- {
- return TRUE;
- }
- else
- {
- return FALSE;
- }
- }
-
-
- /*************************************************************************************************************************
- * 函数 : void AIC_IrqEnable(AIC_IRQ_Typedef AIC_IRQ_n, bool isEnable)
- * 功能 : 设置一个中断使能状态
- * 参数 : AIC_IRQ_n:中断源;isEnable:是否使能中断
- * 返回 : 无
- * 依赖 : 底层
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-30
- * 最后修改时间 : 2020-08-30
- * 说明 :
- *************************************************************************************************************************/
- void AIC_IrqEnable(AIC_IRQ_Typedef AIC_IRQ_n, bool isEnable)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- if(isEnable) //使能对应中断
- {
- AIC->MECR[AIC_IRQ_n/32] = 1 << (AIC_IRQ_n%32); //写1开启对应中断
- }
- else //关闭对应中断
- {
- AIC->MDCR[AIC_IRQ_n/32] = 1 << (AIC_IRQ_n%32); //写1关闭对应中断
- }
- }
-
-
- /*************************************************************************************************************************
- *函数 : void AIC_SetIrqActive(AIC_IRQ_Typedef AIC_IRQ_n)
- *功能 : AIC中断设置为激活状态(软件触发某个中断)
- *参数 : AIC_IRQ_n:中断源
- *返回 : 无
- *依赖 : 底层宏定义
- *作者 : cp1300@139.com
- *时间 : 2020-08-30
- *最后修改时间 : 2020-08-30
- *说明 : 相当于软件触发某个中断
- *************************************************************************************************************************/
- void AIC_SetIrqActive(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- AIC->SSCR[AIC_IRQ_n/32] = 1 << (AIC_IRQ_n%32); //写1软件触发对应中断
- }
-
-
- /*************************************************************************************************************************
- *函数 : void AIC_ClearIrqActive(AIC_IRQ_Typedef AIC_IRQ_n)
- *功能 : AIC软件中断激活状态清除
- *参数 : V3S_IRQ_n:中断编号
- *返回 : 无
- *依赖 : 底层宏定义
- *作者 : cp1300@139.com
- *时间 : 2020-08-30
- *最后修改时间 : 2020-08-30
- *说明 : 相当于清除1个已经触发软件中断的状态
- *************************************************************************************************************************/
- void AIC_ClearIrqActive(AIC_IRQ_Typedef AIC_IRQ_n)
- {
- if(AIC_IRQ_n >= NUMBER_OF_INT_VECTORS) return;
- AIC->SCCR[AIC_IRQ_n/32] = 1 << (AIC_IRQ_n%32); //写1清除软件触发对应中断
- }
-
-
- #if(UCOS_II_EN) //使能了操作系统
-
- #else
- /*************************************************************************************************************************
- * 函数 : void SystemIrqHandler(void)
- * 功能 : 系统中断处理(无操作系统接口)
- * 参数 : 无
- * 返回 : 无
- * 依赖 : 需要在中断程序汇编中编写保护现场,并调用
- * 作者 : cp1300@139.com
- * 时间 : 2020-08-21
- * 最后修改时间 : 2020-08-21
- * 说明 : 用于非OS情况下调用,会直接在startup.s中调用
- *************************************************************************************************************************/
- void SystemIrqHandler(void)
- {
- u32 mISNR;
- u32 intNum;
-
- mISNR = AIC->IPER; //需要先读取IPER,否则ISNR可能没更新,IPER的值>>2位是等于ISNR的,必须先读取IPRE
- mISNR >>= 2;
- //mISNR = AIC->ISNR; //这个寄存器只能读取一次,下次读取会被清零的,ISNR有时候没有及时更新
- intNum = mISNR & 0X3F;
- if ((intNum == 0) || (intNum>=NUMBER_OF_INT_VECTORS))
- {
- AIC->EOSCR = 1; //写入任何值,告诉AIC中断执行完毕了
- return;
- }
- //执行中断服务程序
- ((void (*)(void)) sg_IRQHandlerTable[intNum])(); //执行中断服务程序
- AIC->EOSCR = 1; //写入任何值,告诉AIC中断执行完毕了
- }
-
- #endif //UCOS_II_EN
-
- /*************************************************************************************************************
- * 文件名: irq_aic.h
- * 功能: NUC970 中断控制器
- * 作者: cp1300@139.com
- * 创建时间: 2020-08-30
- * 最后修改时间: 2020-08-30
- * 详细: 中断控制器驱动
- *************************************************************************************************************/
- #ifndef _IRQ_AIC_H_
- #define _IRQ_AIC_H_
- #include "nuc970_system.h"
-
-
-
- //中断源
- typedef enum
- {
- AIC_NULL_INT = 0, //无效的中断
- AIC_WDT_INT = 1, //Watch Dog Timer Interrupt
- AIC_WWDT_INT = 2, //Windowed-WDT Interrupt
- AIC_LVD_INT = 3, //Low Voltage Detect Interrupt
- AIC_EXT0_INT = 4, //外部中断0
- AIC_EXT1_INT = 5, //外部中断1
- AIC_EXT2_INT = 6, //外部中断2
- AIC_EXT3_INT = 7, //外部中断3
- AIC_EXT4_INT = 8, //外部中断4
- AIC_EXT5_INT = 9, //外部中断5
- AIC_EXT6_INT = 10, //外部中断6
- AIC_EXT7_INT = 11, //外部中断7
- AIC_ACTL_INT = 12, //Audio Controller Interrupt
- AIC_LCD_INT = 13, //LCD Controller Interrupt
- AIC_CAP_INT = 14, //Sensor Interface Controller Interrupt
- AIC_RTC_INT = 15, //RTC Interrupt
- AIC_TMR0_INT = 16, //Timer 0 Interrupt
- AIC_TMR1_INT = 17, //Timer 1 Interrupt
- AIC_ADC_INT = 18, //ADC Interrupt
- AIC_EMC0_RX_INT = 19, //EMC 0 RX Interrupt
- AIC_EMC1_RX_INT = 20, //EMC 1 RX Interrupt
- AIC_EMC0_TX_INT = 21, //EMC 0 TX Interrupt
- AIC_EMC1_TX_INT = 22, //EMC 1 TX Interrupt
- AIC_EHCI_INT = 23, //USB 2.0 Host Controller Interrupt
- AIC_OHCI_INT = 24, //USB 1.1 Host Controller Interrupt
- AIC_GDMA0_INT = 25, //GDMA Channel 0 Interrupt
- AIC_GDMA1_INT = 26, //GDMA Channel 1 Interrupt
- AIC_SDH_INT = 27, //SD/SDIO Host Interrupt
- AIC_SIC_INT = 28, //SIC Interrupt
- AIC_UDC_INT = 29, //USB Device Controller Interrupt
- AIC_TMR2_INT = 30, //Timer 2 Interrupt
- AIC_TMR3_INT = 31, //Timer 3 Interrupt
- AIC_TMR4_INT = 32, //Timer 4 Interrupt
- AIC_JPEG_INT = 33, //JPEG Engine Interrupt
- AIC_GE2D_INT = 34, //2D Graphic Engine Interrupt
- AIC_CRYPTO_INT = 35, //CRYPTO Engine Interrupt
- AIC_UART0_INT = 36, //UART 0 Interrupt
- AIC_UART1_INT = 37, //UART 1 Interrupt
- AIC_UART2_INT = 38, //UART 2 Interrupt
- AIC_UART4_INT = 39, //UART 4 Interrupt
- AIC_UART6_INT = 40, //UART 6 Interrupt
- AIC_UART8_INT = 41, //UART 8 Interrupt
- AIC_UART10_INT = 42, //UART 10 Interrupt
- AIC_UART3_INT = 43, //UART 3 Interrupt
- AIC_UART5_INT = 44, //UART 5 Interrupt
- AIC_UART7_INT = 45, //UART 7 Interrupt
- AIC_UART9_INT = 46, //UART 9 Interrupt
- AIC_ETMR0_INT = 47, //Enhanced Timer 0 Interrupt
- AIC_ETMR1_INT = 48, //Enhanced Timer 1 Interrupt
- AIC_ETMR2_INT = 49, //Enhanced Timer 2 Interrupt
- AIC_ETMR3_INT = 50, //Enhanced Timer 3 Interrupt
- AIC_USI0_INT = 51, //USI 0 Interrupt
- AIC_USI1_INT = 52, //USI 1 Interrupt
- AIC_I2C0_INT = 53, //I2C 0 Interrupt
- AIC_I2C1_INT = 54, //I2C 1 Interrupt
- AIC_SMC0_INT = 55, //SmartCard 0 Interrupt
- AIC_SMC1_INT = 56, //SmartCard 1 Interrupt
- AIC_GPIO_INT = 57, //GPIO Interrupt
- AIC_CAN0_INT = 58, //CAN 0 Interrupt
- AIC_CAN1_INT = 59, //CAN 1 Interrupt
- AIC_PWM_INT = 60, //PWM Interrupt
- AIC_KPI_INT = 61, //KPI Interrupt
- }AIC_IRQ_Typedef;
- #define NUMBER_OF_INT_VECTORS 62 //中断数量
-
-
- //中断类型
- typedef enum
- {
- AIC_LOW_LEVEL = 0, //低电平触发-注意:电平触发的中断会被自动清除,电平消失后就没了
- AIC_HIGHT_LEVEL = 1, //高电平触发-注意:电平触发的中断会被自动清除,电平消失后就没了
- AIC_LOW_EDGE = 2, //下降沿触发
- AIC_HIGHT_EDGE = 3, //上升沿触发
- }AIC_IntType;
-
- //相关API
- void AIC_Init(void); //AIC中断控制器初始化(在系统初始化中调用,请勿重复调用)
- void AIC_RegisterIRQHandler(AIC_IRQ_Typedef AIC_IRQ_n, void (*pIRQHandler)(void)); //注册中断服务程序
- void AIC_IrqEnable(AIC_IRQ_Typedef AIC_IRQ_n, bool isEnable); //设置一个中断使能状态
- void AIC_SetIrqTriggered(AIC_IRQ_Typedef AIC_IRQ_n, AIC_IntType AIC_INT_Triggered); //设置一个中断触发方式
- void AIC_SetIrqPriority(AIC_IRQ_Typedef AIC_IRQ_n, u8 AIC_INT_Prio); //设置一个中断优先级
- bool AIC_GetIrqRawStatus(AIC_IRQ_Typedef AIC_IRQ_n); //获取中断原始触发状态
- bool AIC_GetIrqActiveStatus(AIC_IRQ_Typedef AIC_IRQ_n); //获取中断活动状态
- bool AIC_GetIrqStatus(AIC_IRQ_Typedef AIC_IRQ_n); //获取中断状态(中断使能并有效的状态)
- u8 AIC_GetThisIntIRQorFIQ(void); //获取当前的中断是IRQ还是FIQ
- bool AIC_GetIrqEnableStatus(AIC_IRQ_Typedef AIC_IRQ_n); //获取中断使能状态
- void AIC_SetIrqActive(AIC_IRQ_Typedef AIC_IRQ_n); //AIC中断设置为激活状态(软件触发某个中断)
- void AIC_ClearIrqActive(AIC_IRQ_Typedef AIC_IRQ_n); //AIC软件中断激活状态清除
-
-
- #endif //_IRQ_AIC_H_
-
-
- static u8 buff[1024];
- u32 cnt1=0,cnt2 = 0;
-
- UARTx_Init(UART_CH0, 115200, TRUE); //串口初始化
- UARTx_SetRxBuff(UART_CH0, (u8 *)buff, 1024-1);
- SYS_EnableIrq(); //使能系统总中断
- while(1)
- {
- cnt1 = UARTx_GetRxCnt(UART_CH0);
- SYS_DelayMS(10);
- GPIOB->DATAOUT &= ~BIT1;
- cnt2 = UARTx_GetRxCnt(UART_CH0);
- if(cnt2 > 0 && cnt1 == cnt2)
- {
- //uart_printf("接收数据长度:%d\r\n", cnt1);
- UARTx_SendData(UART_CH0, (u8 *)buff, cnt2);
- UARTx_ClearRxCnt(UART_CH0);
- }
- SYS_DelayMS(20);
-
- GPIOB->DATAOUT |= BIT1;
-
- }
https://blog.csdn.net/cp1300/article/details/108314587
|








 楼主
楼主