本帖最后由 上下而求索 于 2023-1-30 11:10 编辑
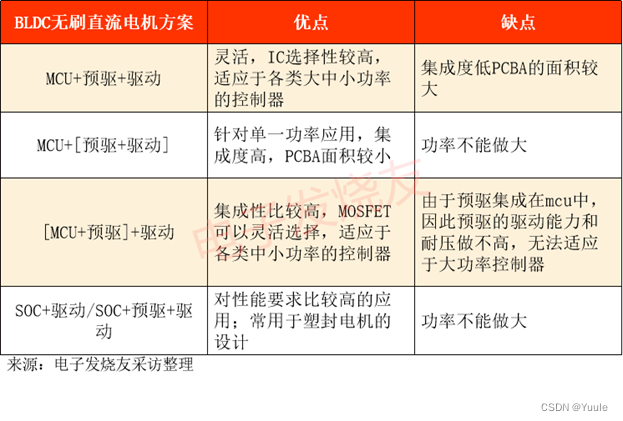
BLDC电机驱动MCU
涉及峰岹、凌鸥、中颖等,还有灵动微、华大、华芯微特等;国外有TI、ST。
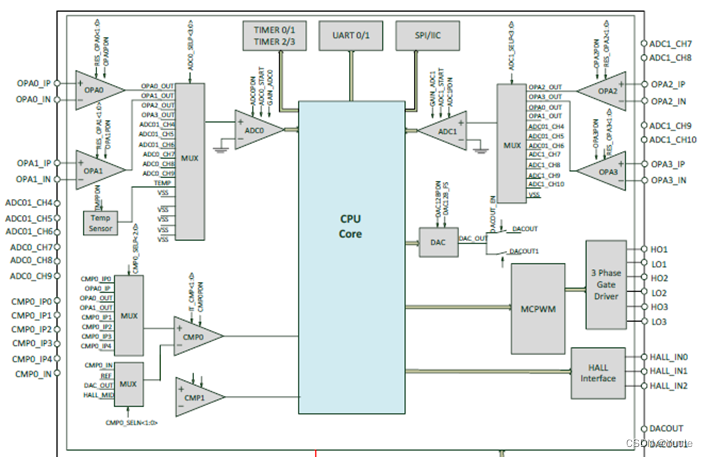
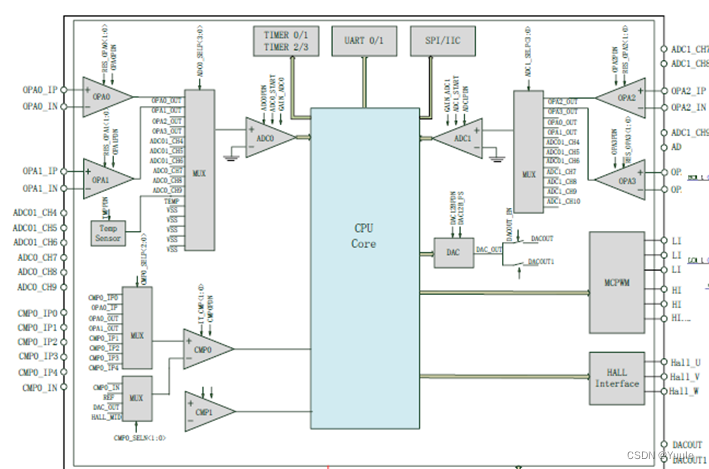
PWM模块和PWMT模块对照ST的高级定时器和通用定时器功能,相关功能见笔者发表的CSDN博客:(1条消息) PWM与PWMT_Yuule的博客-CSDN博客
详情采访记录可见附件《关于BLDC电机驱动MCU的系列问题》
详情算法说明可见附件《BLDC&PMSM算法说明》
git开源项目iBLDC iBLDC/BLDC的六步法&PMSM的FOC法综合.md at master · Staok/iBLDC (github.com)
|








 楼主
楼主