本文档介绍了在 iTOP-4418 开发板上用 PWM 控制蜂鸣器输出的测试历程,基于 QtE 系统。4418MCU 共提供了 5 路 PWM 输出,其中一路未引出,所以共有 4 路可用的 PWM 输出。
注意:本文档中提供的例程,没有注册设备和驱动,只是在驱动入口和出口函数中进行了配置。如果用户需要生成设备节点,则需要自行添加剩余部分,这部分可以参考 GPIO 操作的文档。
1 配置 IO
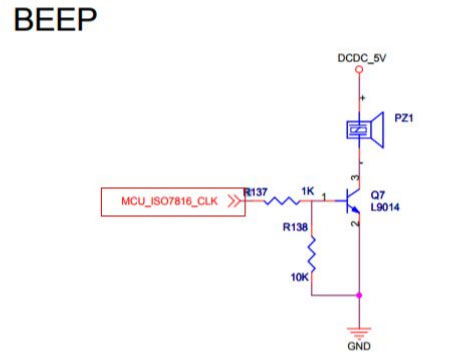
打开底板电路图,搜索“beep”,可以看到 beep 的网络名为“MCU_ISO7816_CLK”,如下图所示。
在核心板原理图,搜索该关键词“MCU_ISO7816_CLK”,可见其对应 PWM2,如下图所示。

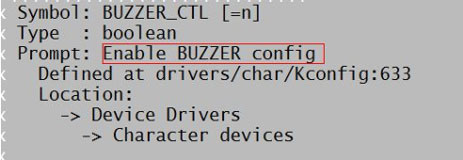
所以,接下来我们便对 PWM2 进行操作。在下面的操作之前,我们需要配置内核,取消内核中 buzzer 的驱动,解除该驱动对蜂鸣器的占用,其目录如下图所示。
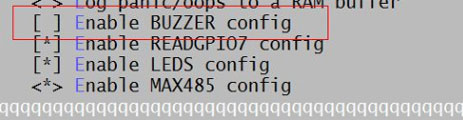
将该选项改为未选中状态,如下图所示。
接下来,编译烧写该内核镜像(boot.img)到开发板。再进行下面的操作即可。
2 编写驱动程序
在 linux 内核中有一个规律,Linux 内核开发者把通用的东西都总结出来,个性化的东西就留出接口,和 GPIO 驱动类似,PWM 驱动在内核中也提供了对应的接口函数,内核提供的接口函数声明在 include/linux/pwm.h 中。
//申请一个 PWM 资源
struct pwm_device *pwm_request(int pwm_id, const char *label);
//释放一个 PWM 资源
void pwm_free(struct pwm_device *pwm);
//配置 PWM
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns);
//使能 PWM,duty_ns 为高电平所用时间,period_ns 整个周期为所用时间,单位为纳秒。
int pwm_enable(struct pwm_device *pwm);
//不使能 PWM
void pwm_disable(struct pwm_device *pwm);
根据以上这些,我们便可以编写一个简单的 pwm 输出程序,来控制蜂鸣器的频率。创建
名称为 4418x_pwm.c 的文件,程序代码如下所示。
#include
#include
#include
#include
#include
#include
#include
#include
#include
/*pwm for this buzzer*/
struct pwm_device *pwm = NULL;
static int __init buzzer_init(void)
{
int ret;
printk(" check buzzer init.\n");
pwm = pwm_request(2, "buzzer");
if ( pwm == NULL ) {
printk("buzzer open error.\n");
}
//printk(KERN_EMERG "pwm_request %d ",pwm);
ret=pwm_config(pwm,100000,200000);//设置了 1000Hz 频率的声音
printk("pwm_config %d ",ret);
printk("pwm_config %d ",ret);
ret=pwm_enable(pwm);
printk("pwm_enable %d ",ret);
printk(KERN_EMERG "done2. \n") ;
return 0;
}
static void __exit buzzer_exit(void)
{
pwm_config(pwm,0,0); //关闭蜂鸣器输出
pwm_disable(pwm); // 关闭 pwm
pwm_free(pwm); // 释放 pwm 资源
}
module_init(buzzer_init);
module_exit(buzzer_exit);
MODULE_DESCRIPTION("pwm_buzzer driver");
MODULE_LICENSE("GPL");
2.2 编写 Makefile
接下来进行编写 Makefile 文件。
export ARCH=arm
obj-m += 4418x_pwm.o
KDIR := /home/topeet/4418/4G/20170914/android/kernel
PWD = $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules
clean:
rm -rf *.o modules.order *.ko *mod.c Module.symvers
脚本中,export ARCH=arm 表示设置目标 CPU 类别为 arm,也就是编译的依赖内核和驱动模块目标 CPU 为 ARM。
obj-m += 4418x_pwm.o 表示编译的源文件为 4418x_pwm.c, 如果源文件名有变化,则需要修改成对应的文件名。
KDIR 参数指向对应的内核源码目录。作者的内核源码是在/home/topeet/4418/4G/20170914/android/kernel 目录下,用户要根据自己的具体情况来修改。
2.3 编译运行
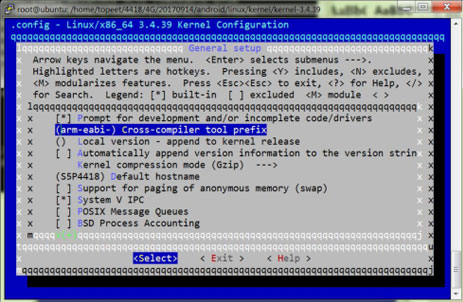
首先设置环境变量,使其在编译时使用源码中的编译器。在源码目录中使用”cdkernel”进入 kernel 目录。然后使用命令“make menuconfig”打开内核缺省配置界面,如下图所示。

进入图中高亮的“General setup”,如下图所示。
可以看到图中高亮的文本,描述了当前源码使用的编译器为“arm-eabi-”,我们回到源码文件夹,使用命令“find ./ -name arm-eabi-*”,可以得到源码中编译器所在路径,如下图所示。
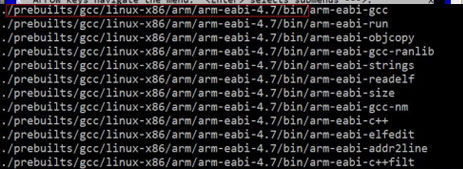
这样,源码编译器的绝对路径为源码所在路径加上上图中红框的路径,在本文中为“/home/topeet/4418/4G/20170914/android/prebuilts/gcc/linux-x86/arm/arm-eabi-4.7/bin/”,因为笔者是用 root 登录的,所以打开文件“/root/.bashrc”在里面添加这样一条内容,如下图所示。

接下来,我们便可以进行编译了。
将 Makefile 与 C 程序放在 Ubuntu 系统的同一目录。如下图所示。

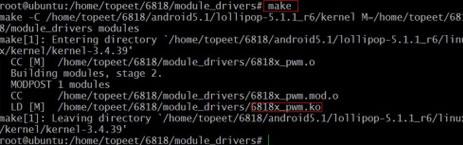
在当前目录输入“make”开始编译,生成内核模块文件“ 4418x_pwm.ko”,如下图所示。
将该内核模块文件拷贝到开发板,接下来在超级终端使用命令“insmod4418x_pwm.ko”加载该模块,如下图所示。

模块加载成功,同时蜂鸣器响起高频声音。然后使用命令“rmmod 4418x_pwm”卸载该驱动,如下图所示。

此时,蜂鸣器停止播放高频声音,PWM 蜂鸣器测试例程到此结束。

|















 楼主
楼主

 标题置顶
标题置顶 标题高亮
标题高亮

